Kleiner Zwischenbericht:
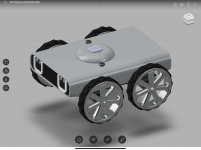
Prototyp2 (der große blaue mit lenkenden Vorderrädern) hat zum Ende der Saison ein Rad verlohren. Da sich das nicht auf die Schnelle reparieren lies, mußte Prototyp3 (siehe Bild oben) die letzten Tage noch mähen. Eigentlich wollte ich ihn danach zerlegen.
Prototyp3 wird nun überarbeitet:
- die Schnittbreite wird auf 2x15cm erweitert
- für den Antrieb kommen BLDC-Getriebemotoren mit integriertem Treiber zum Einsatz (in der Hoffnung, daß das Drehmoment nun ausreichend ist)
- die Steppertreiber sind entfallen und wurden durch einfache Transistoren zwecks Pegelanpassung 3,3V Teensy / 5V BLDC-
Motor ersetzt
- das Gehäuse wurde konstruktiv stark vereinfacht, damit es besser zu drucken ist.
- der Boden/Rahmen wird den neuen Maßen angepaßt
- der Rest der Hardware ist Übernahme
- Software ist Azurit für Teensy mit meinen Anpassungen
-> damit sollte Prototyp3_B wieder laufen.
Neu: Erweiterungsmodul
In den letzten Wochen habe ich mich mit dem „Projekt“ Ardupilot beschäftigt.
Aktuell läuft auf einem Pixhawk 2.4.8 (Clone) der letzte Softwarestand des ArduRovers (ArduPilot-Rover), noch in Einzelteilen auf dem Schreibtisch.
Mit MissionPlanner kann man „beliebige“ Fahrten planen und auf den Piwhawk laden. Der Rover/Mäher fährt dann autark. Das ganze läßt sich mit einem
RTK-Modul ausrüsten und erhält dadurch die erforderliche Genauigkeit. Das „Projekt“ Ardupilot ist extrem mächtig.
Das „Erweiterungsmodul“ (Pixhawk + simpleRTK Pro + 10 Kanal-RC-Steuerung) soll huckepack auf den bestehenden Mäher aufgesetzt werden. Die Pixhawk-Servoausgänge leiten das Fahrsignal (RC-Steuerung oder autopilot) an die RC-Eingänge des Mäher weiter. Dadurch stehen beide Welten (Azurit + ArduRover) zur Verfügung.
Ausblick Prototyp4:
- Teile für den Antrieb sind bereits vorhanden: 4 x 400W BLDC-Motoren aus einem hoverboard, zugehörige 42V-Akkus, 400W-BLDC-Treiber
- Vorderräder mit Lenkfunktion
- Elektronik ist abhängig vom Erfolg des Erweiterungsmoduls
Soviel zum Jahresausklang.
Ich wünsche Euch einen fürstlichen Rutsch ins neue Jahr 2023,
Gruß Fürst Ruprecht












 Bekomme als Suchantwort alles mögliche, nur nicht diese Elemente.
Bekomme als Suchantwort alles mögliche, nur nicht diese Elemente. 










