Fürst Ruprecht
Well-known member
„Arnold“ - Stand 20.04.2024

„EVE“ - Stand 03.03.2023
Anhang anzeigen IMG_7390.MOV
“deTHoMAso“ - Stand 19.04.2022:

 Anhang anzeigen 3645
Anhang anzeigen 3645
Anhang anzeigen IMG_6992.MOV
Anhang anzeigen IMG_6988.MOV
…so hat der Beitrag einst begonnen ….
Hallo Leute,
Allradantrieb war im Forum schon einige Male ein Thema, wurde aber aus meiner Sicht nur wenig bearbeitet.
Mein Grundstück (Neubau) hat eine Abböschung , der Boden ist mit Substrat aufgefüllt, welches ohne Grasbewuchs recht locker ist.
Der Standard-Zweirad Antrieb reicht von der Traktion nicht um die Böschung hochzufahren, schon garnicht mit schmaler Bereifung.
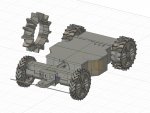
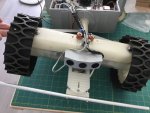
Nach einigen Tests mit zwei und vier angetriebenen Rädern hat sich mein aktueller Stand ergeben.
Den möchte ich Euch hier zeigen, auch wenn er aus meiner Sicht noch lange nicht robust funktioniert.
Der Antrieb stellt dabei nicht die wesentliche Herausforderung dar, die liegt eher in der Ablaufsteuerung, die sich schon deutlicher von dem Standard unterscheidet.
Aber nun seht ersteinmal wie mein aktueller Stand (Chasis) ist.
Anhang anzeigen 4motion1.MOV
Anhang anzeigen 4motion2.MOV
Anhang anzeigen 4Motion8.mp4
„EVE“ - Stand 03.03.2023
Anhang anzeigen IMG_7390.MOV
“deTHoMAso“ - Stand 19.04.2022:
Anhang anzeigen 3645Anhang anzeigen IMG_6992.MOV
Anhang anzeigen IMG_6988.MOV
…so hat der Beitrag einst begonnen ….
Hallo Leute,
Allradantrieb war im Forum schon einige Male ein Thema, wurde aber aus meiner Sicht nur wenig bearbeitet.
Mein Grundstück (Neubau) hat eine Abböschung , der Boden ist mit Substrat aufgefüllt, welches ohne Grasbewuchs recht locker ist.
Der Standard-Zweirad Antrieb reicht von der Traktion nicht um die Böschung hochzufahren, schon garnicht mit schmaler Bereifung.
Nach einigen Tests mit zwei und vier angetriebenen Rädern hat sich mein aktueller Stand ergeben.
Den möchte ich Euch hier zeigen, auch wenn er aus meiner Sicht noch lange nicht robust funktioniert.
Der Antrieb stellt dabei nicht die wesentliche Herausforderung dar, die liegt eher in der Ablaufsteuerung, die sich schon deutlicher von dem Standard unterscheidet.
Aber nun seht ersteinmal wie mein aktueller Stand (Chasis) ist.
Anhang anzeigen 4motion1.MOV
Anhang anzeigen 4motion2.MOV
Anhang anzeigen 4Motion8.mp4
Anhänge
Zuletzt bearbeitet:
") Per Fernsteuerung bekäme ich das sicherlich noch gebacken, aber wenn, sollte er automatisch fahren. Bei der Mechanik sehe ich kein Problem. Allerdings bin ich die totale Niete in Software. Mit Basic, Cobol und Fortran komme ich da nicht weit.
Per Fernsteuerung bekäme ich das sicherlich noch gebacken, aber wenn, sollte er automatisch fahren. Bei der Mechanik sehe ich kein Problem. Allerdings bin ich die totale Niete in Software. Mit Basic, Cobol und Fortran komme ich da nicht weit.