Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Lawn Mower AWD Mähroboter Allrad Automower All wheel drive 4WD von Fürst Ruprecht
- Ersteller Fürst Ruprecht
- Erstellt am
Fürst Ruprecht
Well-known member
themanfrommoon
Active member
Miss mal den Stromverbrauch.
Wieviel mal höher ist der im Vergleich mit (BL-)DC Motoren?
Wieviel mal höher ist der im Vergleich mit (BL-)DC Motoren?
Fürst Ruprecht
Well-known member
Werde ich machen. Dazu muß er aber auf dem Rasen störungsfrei laufen.
It's certainly true on flat area, but the 4WD is build for big slope
On big slope BL motor driver also need to be perfectly adjusted to avoid strange behaviour (low react time)
Fürst Ruprecht
Well-known member
Stand 11.04.2022:
Vom störungsfreien Laufen (s.o.) bin ich wohl noch weit entfernt.
Immerhin funktioniert nach 3 grausamen Tagen das Fahren und Lenken per Fernsteuerung.
Der Traktor lenkt an der Vorderachse (starre Ramenverbindung): Dabei schwenkt die Hinterachse leicht ein (sehr wichtig bei Autobahnfahrt!). Der Lenkeinschlag wird an Vorder- und Hinterachse gemessen und bei Soll/Ist-Abweichung steuert ein Drehzahloffset an den Rädern entgegen. Die einzelnen Raddrehzahlen werden aus dem Istwinkel der Räder berechnet. (Es geht auch das Sollsignal. Dann wird die Lenkung schneller und es gibt entsprechend Schlupf)
Der Traktor lenkt an der Hinterachse: (hier ist die Achse drehbar am Rahmen befestigt)(Vorn kann auch Hinten sein - Geschmackssache). Also genauso wie oben.
Der Traktor lenkt an beiden Achsen: Hier habe ich das Verhältnis von Vorn zu Hinten 1:1 gesetzt. Man kann auch dynamisch von 1:0 bis 0:1 stufenlos verändern, ist aber recht schwer in der Bedienung.
Gruß Fürst Ruprecht
Anhang anzeigen IMG_6981.MOV
Anhang anzeigen IMG_6980.MOV
Anhang anzeigen IMG_6979.MOV
Anhang anzeigen IMG_6978.MOV
Vom störungsfreien Laufen (s.o.) bin ich wohl noch weit entfernt.
Immerhin funktioniert nach 3 grausamen Tagen das Fahren und Lenken per Fernsteuerung.
Der Traktor lenkt an der Vorderachse (starre Ramenverbindung): Dabei schwenkt die Hinterachse leicht ein (sehr wichtig bei Autobahnfahrt!). Der Lenkeinschlag wird an Vorder- und Hinterachse gemessen und bei Soll/Ist-Abweichung steuert ein Drehzahloffset an den Rädern entgegen. Die einzelnen Raddrehzahlen werden aus dem Istwinkel der Räder berechnet. (Es geht auch das Sollsignal. Dann wird die Lenkung schneller und es gibt entsprechend Schlupf)
Der Traktor lenkt an der Hinterachse: (hier ist die Achse drehbar am Rahmen befestigt)(Vorn kann auch Hinten sein - Geschmackssache). Also genauso wie oben.
Der Traktor lenkt an beiden Achsen: Hier habe ich das Verhältnis von Vorn zu Hinten 1:1 gesetzt. Man kann auch dynamisch von 1:0 bis 0:1 stufenlos verändern, ist aber recht schwer in der Bedienung.
Gruß Fürst Ruprecht
Anhang anzeigen IMG_6981.MOV
Anhang anzeigen IMG_6980.MOV
Anhang anzeigen IMG_6979.MOV
Anhang anzeigen IMG_6978.MOV
themanfrommoon
Active member
Moin,
Die Lenkgeometrie sieht nicht optimal aus.
Es sieht aus, als ob die Räder immer exakt parallel stehen.
Das ist aber nur für geradeaus korrekt.
In einer Kurve müssen die Räder in unterschiedlichen Winkeln zueinander stehen, damit sie konzentrischen Kreisbahnen folgen können.
Beste Grüße,
Chris
Die Lenkgeometrie sieht nicht optimal aus.
Es sieht aus, als ob die Räder immer exakt parallel stehen.
Das ist aber nur für geradeaus korrekt.
In einer Kurve müssen die Räder in unterschiedlichen Winkeln zueinander stehen, damit sie konzentrischen Kreisbahnen folgen können.
Beste Grüße,
Chris
Zuletzt bearbeitet:
Fürst Ruprecht
Well-known member
Hallo Chris,
ist nicht optimal, aber besser als man meint.
„Die technischen Spezialteile der hochpräzis entwickelten Achsaufhängung“ - damit meine ich die Bauteile aus dem Baumarkt, „sind exakt, computergestützt ausgerichtet“ - also, so angebracht, daß ich mit „meinen hochtechnologischen Fertigungseinrichtungen“ - also meiner 30 Jahre alten Hobby-Ständerbohrmaschine - „optimal fügen“ - also anschrauben kann.
Die Flügelschraube der Lenkstange sitzt außer Mitte, dadurch entsteht das, was Du meinst, die äußeren Räder beschreiben einen größeren Bahnradius. Mehr geht auf dem „einfachen“ Weg nicht, weil sonst die senkrechte Achsschraube nicht nach unten durchgeschraubt werden kann, also Flügelschraube und Innensechskantschraube liegen fast aneinander. (Man kann die Flügelmutter noch weiter ein/rausschrauben, damit verändert man den Effekt)
Aus meiner Sicht ist der Abstand vom Drehpunkt zum Rad ein noch größeres Thema. Letztendlich habe versucht, eine möglichst ganz einfache Konstruktion zu machen.
Was man nicht vergessen sollte ist die spätere Ansteuerung der Räder. Wenn Du die Raddrehzahl richtig berechnen willst (mit trigonometrischen Funktionen), reicht die Rechenleistung des Due für alle Aufgaben nicht mehr aus. Also muß man lineare Annäherungen nutzen. Zudem ist die Erfassung der Lenkwinkel nicht störungsfrei (also Glätten/Filtern->verfälschen). Letztlich wird der Radeinschlag durch eine Überlagerung der „optimalen“ Radgeschwindigkeit erreicht, was ja bedeutet, daß das Rad nicht korrekt rotiert.
Also Du hast Recht. Aber es ist nur ein Prototyp zum Rasen mähen mit vielen weiteren Unzulänglichkeiten.
Mein Ansehen ist, hier auch sehr einfache Alternativen aufzuzeigen, wie man als Bastler ein Fahrzeug bauen könnte, welchem man gerne beim Fahren zuschaut. Der Standard-Ardumower ist mir da einfach zu Standard (mal abgesehen davon, daß er meine Böschung nicht schafft).
Heute Nacht habe ich darüber nachgedacht (nachdem jetzt der Antrieb mit Radeinschlag erstmal überhaupt funktioniert), ob ich nicht doch zu einer starren Anordnung zurück wechseln sollte, weil damit der erforderliche Bauraum deutlich schrumpft. Ich werde mal einen Test machen.
Danke für Dein Hinweis, finde ich super.
Gruß Fürst Ruprecht
ist nicht optimal, aber besser als man meint.
„Die technischen Spezialteile der hochpräzis entwickelten Achsaufhängung“ - damit meine ich die Bauteile aus dem Baumarkt, „sind exakt, computergestützt ausgerichtet“ - also, so angebracht, daß ich mit „meinen hochtechnologischen Fertigungseinrichtungen“ - also meiner 30 Jahre alten Hobby-Ständerbohrmaschine - „optimal fügen“ - also anschrauben kann.
Die Flügelschraube der Lenkstange sitzt außer Mitte, dadurch entsteht das, was Du meinst, die äußeren Räder beschreiben einen größeren Bahnradius. Mehr geht auf dem „einfachen“ Weg nicht, weil sonst die senkrechte Achsschraube nicht nach unten durchgeschraubt werden kann, also Flügelschraube und Innensechskantschraube liegen fast aneinander. (Man kann die Flügelmutter noch weiter ein/rausschrauben, damit verändert man den Effekt)
Aus meiner Sicht ist der Abstand vom Drehpunkt zum Rad ein noch größeres Thema. Letztendlich habe versucht, eine möglichst ganz einfache Konstruktion zu machen.
Was man nicht vergessen sollte ist die spätere Ansteuerung der Räder. Wenn Du die Raddrehzahl richtig berechnen willst (mit trigonometrischen Funktionen), reicht die Rechenleistung des Due für alle Aufgaben nicht mehr aus. Also muß man lineare Annäherungen nutzen. Zudem ist die Erfassung der Lenkwinkel nicht störungsfrei (also Glätten/Filtern->verfälschen). Letztlich wird der Radeinschlag durch eine Überlagerung der „optimalen“ Radgeschwindigkeit erreicht, was ja bedeutet, daß das Rad nicht korrekt rotiert.
Also Du hast Recht. Aber es ist nur ein Prototyp zum Rasen mähen mit vielen weiteren Unzulänglichkeiten.
Mein Ansehen ist, hier auch sehr einfache Alternativen aufzuzeigen, wie man als Bastler ein Fahrzeug bauen könnte, welchem man gerne beim Fahren zuschaut. Der Standard-Ardumower ist mir da einfach zu Standard (mal abgesehen davon, daß er meine Böschung nicht schafft).
Heute Nacht habe ich darüber nachgedacht (nachdem jetzt der Antrieb mit Radeinschlag erstmal überhaupt funktioniert), ob ich nicht doch zu einer starren Anordnung zurück wechseln sollte, weil damit der erforderliche Bauraum deutlich schrumpft. Ich werde mal einen Test machen.
Danke für Dein Hinweis, finde ich super.
Gruß Fürst Ruprecht
themanfrommoon
Active member
Ich glaube, dass man das nicht aktiv machen muss.Wenn Du die Raddrehzahl richtig berechnen willst (mit trigonometrischen Funktionen), reicht die Rechenleistung des Due für alle Aufgaben nicht mehr aus.
Wenn der Winkel bekannt ist, dann könnte man eine einfache Tabelle nehmen, in der man die Berechnung vorher gemacht hat und nur die Ergebniswerte hinterlegt hat. Das kostet dann keine Rechenleistung im Betrieb.
Spannend ist das Thema 4x4x4 (Vierradantrieb mit Vierradlenkung) auf jeden Fall.
Wichtig ist am Ende natürlich die Standfestigkeit im Dauerbetrieb.
Beste Grüße,
Chris
Fürst Ruprecht
Well-known member
na ja, viel kann an der Mechanik nicht kaputt gehen. Ob der Stepperantrieb durchhält, das muß man sehen.Standfestigkeit
Die Tabelle ist ja eine früher oft verwendete Lösung. Da war die Rechenleistung noch gering und man hat sich mit Kennfeldern beholfen. Bei meinem Prototypen-2 habe ich es mit linearer Annäherung gemacht, was völlig ausreichend ist. Bei dem Traktor verwende ich den Teensy4.1. Der ist mit den Winkelfunktionen noch nicht mal richtig gefordert.
Fürst Ruprecht
Well-known member
Aktueller Stand des Prototypen 2:
So sieht es auf dem Acker aus, wenn die Lenkung lediglich über die Raddrehzahl gesteuert wird.
Anhang anzeigen IMG_6986.MOV
Anhang anzeigen IMG_6985.MOV
Aus meiner Sicht ausreichend funktional.
Details hier: https://www.diy-robot-lawn-mower.co...-all-wheel-drive-awd-4wd-allrad-4x4.16/page-2
Gruß Fürst Ruprecht
So sieht es auf dem Acker aus, wenn die Lenkung lediglich über die Raddrehzahl gesteuert wird.
Anhang anzeigen IMG_6986.MOV
Anhang anzeigen IMG_6985.MOV
Aus meiner Sicht ausreichend funktional.
Details hier: https://www.diy-robot-lawn-mower.co...-all-wheel-drive-awd-4wd-allrad-4x4.16/page-2
Gruß Fürst Ruprecht
Fürst Ruprecht
Well-known member
Fürst Ruprecht
Well-known member
Fürst Ruprecht
Well-known member
Anhang anzeigen IMG_7002.MOVbrushless in NullKommaNix
Fürst Ruprecht
Well-known member
Kind-Mäher in freier Natur:
Fürst Ruprecht
Well-known member
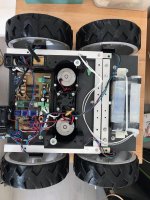
Aktueller Stand Prototyp-3
Anhänge
-
 C6B08A0D-6099-4662-9107-400A5062BE39.jpeg898,8 KB · Aufrufe: 24
C6B08A0D-6099-4662-9107-400A5062BE39.jpeg898,8 KB · Aufrufe: 24 -
 17EF008E-2FB0-4968-927D-269D7AC4054C.jpeg898,8 KB · Aufrufe: 26
17EF008E-2FB0-4968-927D-269D7AC4054C.jpeg898,8 KB · Aufrufe: 26 -
 36DD889E-5FCB-4A60-A2AF-A3DD1223FD9D.jpeg744,3 KB · Aufrufe: 25
36DD889E-5FCB-4A60-A2AF-A3DD1223FD9D.jpeg744,3 KB · Aufrufe: 25 -
 E027E221-CA77-47BD-901C-9371853ADDBC.jpeg627,3 KB · Aufrufe: 25
E027E221-CA77-47BD-901C-9371853ADDBC.jpeg627,3 KB · Aufrufe: 25 -
 5EC9BFA0-2D61-4951-82C3-D2CCF106E76B.jpeg963,6 KB · Aufrufe: 27
5EC9BFA0-2D61-4951-82C3-D2CCF106E76B.jpeg963,6 KB · Aufrufe: 27 -
 A656F718-9E5A-4509-B3CB-AA5BE142366D.jpeg952,2 KB · Aufrufe: 27
A656F718-9E5A-4509-B3CB-AA5BE142366D.jpeg952,2 KB · Aufrufe: 27 -
 A6FFE040-912F-4CF2-8C10-7ACFEAD9D3CF.jpeg1.014,7 KB · Aufrufe: 24
A6FFE040-912F-4CF2-8C10-7ACFEAD9D3CF.jpeg1.014,7 KB · Aufrufe: 24 -
 E6FEF348-3395-4FE7-90A2-2EF1D513DEC8.jpeg1.018,7 KB · Aufrufe: 25
E6FEF348-3395-4FE7-90A2-2EF1D513DEC8.jpeg1.018,7 KB · Aufrufe: 25
Fürst Ruprecht
Well-known member
Prototyp-3 mäht:
Gruß Fürst Ruprecht
Gruß Fürst Ruprecht
Hallo Fürst Ruprecht
super Projekt. Ich würde die SW noch so modifizieren, dass bei engen Radien die kurveninneren Räder nicht einfache stehen bleiben, sondern entgegengesetzt drehen.
Soweit ich weiss, machen das Zero-Turn-Mäher, Bagger, etc. alle so, weil somit die Schäden am Untergrund (Gras) geringer sind.
super Projekt. Ich würde die SW noch so modifizieren, dass bei engen Radien die kurveninneren Räder nicht einfache stehen bleiben, sondern entgegengesetzt drehen.
Soweit ich weiss, machen das Zero-Turn-Mäher, Bagger, etc. alle so, weil somit die Schäden am Untergrund (Gras) geringer sind.
Fürst Ruprecht
Well-known member
Hallo Eddi,
danke für Deinen Hinweis. und die Blumen - freut mich.
Im Remote (Fernbedienungs-) Modus macht er das bereits.
Ich muß mich mit Bernard´s azuritBer für Teensy noch etwas vertrauter machen. Wahrscheinlich ist das nur Einstellungssache.
Gruß Fürst Ruprecht
danke für Deinen Hinweis. und die Blumen - freut mich.
Im Remote (Fernbedienungs-) Modus macht er das bereits.
Ich muß mich mit Bernard´s azuritBer für Teensy noch etwas vertrauter machen. Wahrscheinlich ist das nur Einstellungssache.
Gruß Fürst Ruprecht