@spranz:
Offensichtlich lädt meine Batterie noch nicht (Noch ein Problem auf dem Weg zum Erfolg ;-(. Die Inbetriebnahme habe ich daher mit dem Netzteil durchgeführt. Das könnte der Grund sein, dass bei mir keine Sicherungen durch sind, da das Netzteil eigenständig, geringer und automatisch abgesichert ist. Falls das der Fall gewesen wäre, dann ist das vielleicht grundsätzlich ein hilfreicher Tip bei der Inbetriebnahme?
@ Raschl:
Dessen bin ich mir bewußt. Entschuldigung hierfür. Aber zum einen habe ich keinen anderen Platz für die BL Diskussion gefunden vor allem aber solange ich den Fehler nicht gefunden habe ( und "spranz" scheint ja ein vergleichbares Problem zu haben) könnte es ja auch ein Problem des Board sein? Beim Aufbau meines Bausatzes bin ich übrigens natürlich auf die gleichen Probleme gestoßen, wie du sie zwischenzeitlich oben angefragt hast. Auch mir geht es um den Weg den Bausatz in den Einsatz zu bringen.
Aus meiner Sicht könnte man die Themen wie folgt sortieren. Vermutlich weniger hier in der Forum, vielmehr im WiKi oder als eigenständige PDF.
Bausatz
Anteil Hardware
- Spezielle Halterung für BL Mähmotor mit geringerem Durchmesser ( habe ich gefunden, leigt als 3 D Druck bei)
- 2x Unterlegscheibe M8 Bumper fehlt ( könnte aber auch nur ein Fehler meiner Bestellung gewesen sein)
- Was, wenn der Ring der Spannhülse nicht festklemmt, sondern lose auf der Welle sitzt ?
Anteil Elektrik & PCB
- Stecker
- Zur empfohlenen Vollbestückung der Platine fehlen folgende Pfostenstecker:
8 Stück x 3 fach
2 Stück x 4 fach
3 Stück x 5 fach
- Stecker zum Anschluß der Umtraschallsensoren fehlen
Empfohlen 3Stück x 4 fach ????
- Kabel
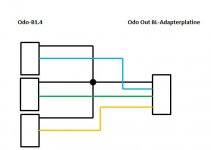
- Es fehlt ein Kabel „Odometrie bei BL“ - ( hier ggf. Hinweis Verdrahtung / Hinweis 220nF Kondensatoren Fix )
- Es fehlt ein Kabel „Bumper“ - Hinweis Verdrahtung
- Bei Verwendung BL Motoren fehlt 3 x 220nF Kondensatoren
- IMU fehlt - Empfehlung für welchen Zweck?
- Kondensatoren 1x47uF statt 22uF
- ohne LED Bargraph
- Dioden Relais & Motorschaltung bereits bestückt
- INA bereist bestückt
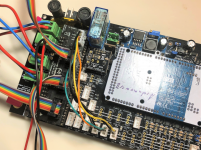
PCB 1.4 - Löten / Aufbauen
- Bauanleitung:
https://wiki.ardumower.de/index.php?title=PCB_1.4_(Deutsch)
-
Arduino Stiftleiste - Vertauschungsfehler besteht nicht mehr
-
Motortreiber Kondensatoren vollständig bestücken, auch wenn später BL
- 2 Brücken löten ( links von JC 2 ) Warum?
- Odo Teiler ganz links sind bereits gedrückt. Es müssen nur bei anderen Werten die Leiterbahn unterbrochen und neu gelötet werden
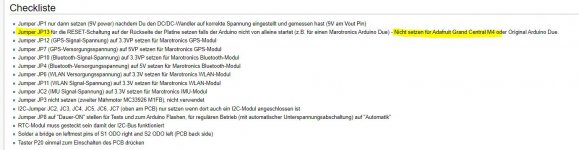
- J13 nur für den
Arduino Due Clone setzen. nicht für den Originalen Due und nicht für den
M4.
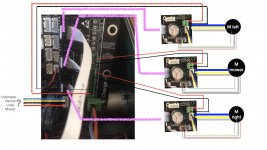
BL
- Löten / Aufbauen
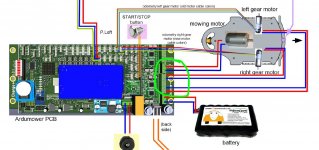
- Anschlußplan
- Adapterplatte auf dem PCB beinhaltet eigentlich nur die Stecker und Stifte
- Warum hat einer der Treiber einen Stecker zu wenig - Mähmotor - SPI?
- Sind die Treiber bereits vorprogrammiert ? Wie kann man das erkennen?
- Fix der Odometrie auf
PCB 1.4 per 220nF Kondensatoren. (
https://wiki.ardumower.de/index.php?title=Brushless_Drive)
Inbetriebnahme
- Unterteilung nach einer systematische Reihenfolge der Inbetriebnahme der Komponenten, also z.B.
- 0.
Arduino DUE oder
Arduino Mega2560 / Adafruit
M4
- 1. RTC
- 2. Blutooth (BLE )
- 3. WiFi (ESP 8266)
- 4. Blutooth & WiFi auf gemeinsamen Board (ESP 32)
- 5. Akku Laden
- 6. BL Antriebe
Sunray - config.h
// ...for the
brushless motor april 2021
https://wiki.ardumower.de/index.php?title=Datei:BLUnit.JPG
#define TICKS_PER_REVOLUTION 1300 / 2 // 1194/2 odometry ticks per wheel revolution
- Ultraschall
- Remote Control
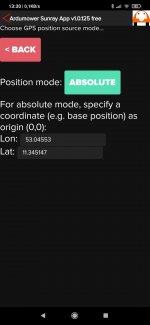
- GPS
- SAPOS
- ….
- Für jeden Schritt könnte es hilfreich sein eine andere Software (sunray/ardumower) auf den
Arduino aufzuspielen mit geänderten Einstellungen der config.h, Kabel anzuklemmen, Jumper zu setzen, das Smartphone mit einer bestimmten App zu verwenden u.s.w.
App
- Installation / Verbindung herstellen
- Konfiguration

")