So liebe Freunde des gepflegten Rasens.
Zum Jahresabschluss zünde ich mal einen Knaller.
Das ich kurzfristig einen Brushless Controler gebaut habe ist nicht nur der Tatsache geschuldet, dass mir die ACT Regler zu groß sind.
Markus und Alexander suchen ja schon seit längerem nach Burshless Motoren für den Ardumower und ich habe auch Testmuster von Motoren mit eingebauten Reglern von Markus bekommen, die aber technisch voll versagt haben und auch die 30V nicht mitgemacht haben, die wir brauchen….
Daher haben wir vor einigen Wochen beschlossen einen eigenen Regler zu bauen und BL Motoren ohne Regler einzukaufen. Diese Motoren sind jetzt nach Weihnachten von Markus an mich geschickt worden und ich habe sie gleich mal getestet und bin mit dem ersten Ergebnis sehr zufrieden.
Die Fahrtmotoren sind vom Einbau her 1:1 mit den jetzigen Bürstenmotoren kompatibel, sodass ihr nicht zus. Halterungen basten müßt.
Auch hat Markus einen adequarrten Messermotor ausgesucht, sodass alle 3 Motoren im Ardumower brushless werden können.
Im Video seht ihr die 3 Motoren mit den schon bekannten Reglern, die leise und smooth laufen.
Alles wird so gebaut, das Nutzer auch von alten Boards auch auf Brushless wechseln können.
Details folgen, aber es wird über den Adapter laufen, den ich ja schon vorgestellt habe.
Im neuen Jahr werde ich mal ein paar Videos von Tests hochladen und euch an den Fortschritten teilhaben lassen. Das wir dann aber ein gesonderter Beitrag werden…..
Wo sind wir in der Entwicklung und wie geht es weiter?
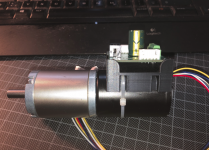
Wie ihr seht, die Platine läuft, muß aber für die „Serie“ nochmal überarbeitet werden wg. der Steckerbelegungen der Motoren und Sensoren. Das ist eigentlich schon fertig, aber ich warte noch die weiteren Tests ab, bis ich dann die finale Version der Platine in Auftrag gebe.
Ursprünglich hatte ich mal gedacht die Platine am Ende des Motors zu montieren. Das klappt aber nicht, da der Motor keine Gewinde oder andere Befestigungsmöglichkeiten hat. Daher ist meine quick and dirty Befestigung vermutlich auch die zukünftige Art der Montage. Da muß aber das 3D Druckteil noch ordentlich entwickelt werden…..
Ansonsten ist jetzt der Einbau in den Ardumower und testen angesagt, auch unter extremer Hitze…..
Das wird jetzt sicher noch ein paar Wochen dauern, aber ich hoffe das wir dann zum Frühjahr alles fertig haben und das von Markus dann im Shop aufgenommen werden kann.
Also, seid gespannt auf die weiteren Berichte in einem separaten Artikel und drückt die Daumen dass alles weiter so gut klappt wie bisher.
Ich wünsche euch allen ein frohes neues Jahr und einen guten Rutsch.


Anhang anzeigen BL-Set.mp4
Zum Jahresabschluss zünde ich mal einen Knaller.
Das ich kurzfristig einen Brushless Controler gebaut habe ist nicht nur der Tatsache geschuldet, dass mir die ACT Regler zu groß sind.
Markus und Alexander suchen ja schon seit längerem nach Burshless Motoren für den Ardumower und ich habe auch Testmuster von Motoren mit eingebauten Reglern von Markus bekommen, die aber technisch voll versagt haben und auch die 30V nicht mitgemacht haben, die wir brauchen….
Daher haben wir vor einigen Wochen beschlossen einen eigenen Regler zu bauen und BL Motoren ohne Regler einzukaufen. Diese Motoren sind jetzt nach Weihnachten von Markus an mich geschickt worden und ich habe sie gleich mal getestet und bin mit dem ersten Ergebnis sehr zufrieden.
Die Fahrtmotoren sind vom Einbau her 1:1 mit den jetzigen Bürstenmotoren kompatibel, sodass ihr nicht zus. Halterungen basten müßt.
Auch hat Markus einen adequarrten Messermotor ausgesucht, sodass alle 3 Motoren im Ardumower brushless werden können.
Im Video seht ihr die 3 Motoren mit den schon bekannten Reglern, die leise und smooth laufen.
Alles wird so gebaut, das Nutzer auch von alten Boards auch auf Brushless wechseln können.
Details folgen, aber es wird über den Adapter laufen, den ich ja schon vorgestellt habe.
Im neuen Jahr werde ich mal ein paar Videos von Tests hochladen und euch an den Fortschritten teilhaben lassen. Das wir dann aber ein gesonderter Beitrag werden…..
Wo sind wir in der Entwicklung und wie geht es weiter?
Wie ihr seht, die Platine läuft, muß aber für die „Serie“ nochmal überarbeitet werden wg. der Steckerbelegungen der Motoren und Sensoren. Das ist eigentlich schon fertig, aber ich warte noch die weiteren Tests ab, bis ich dann die finale Version der Platine in Auftrag gebe.
Ursprünglich hatte ich mal gedacht die Platine am Ende des Motors zu montieren. Das klappt aber nicht, da der Motor keine Gewinde oder andere Befestigungsmöglichkeiten hat. Daher ist meine quick and dirty Befestigung vermutlich auch die zukünftige Art der Montage. Da muß aber das 3D Druckteil noch ordentlich entwickelt werden…..
Ansonsten ist jetzt der Einbau in den Ardumower und testen angesagt, auch unter extremer Hitze…..
Das wird jetzt sicher noch ein paar Wochen dauern, aber ich hoffe das wir dann zum Frühjahr alles fertig haben und das von Markus dann im Shop aufgenommen werden kann.
Also, seid gespannt auf die weiteren Berichte in einem separaten Artikel und drückt die Daumen dass alles weiter so gut klappt wie bisher.
Ich wünsche euch allen ein frohes neues Jahr und einen guten Rutsch.
Anhang anzeigen BL-Set.mp4

")