FUSION FILES AVAILABLE / Fusion 360 Dateien verfügbar
Thanks to Robin, he allowed me to share my Fusion Files with you. Please note, my design is based on his ton of work, so credits to Robin.
Vielen Dank an Robin, er hat mir erlaubt, meine Version zu veröffentlichen. Bitte beachtet, dass meine Arbeit auf seiner tollen Arbeit basiert. Er hat viel Zeit hier investiert, also bedankt euch bei ihm.
Upper Chassis Part / obere Chassis Teile
https://a360.co/2T5u2Xv
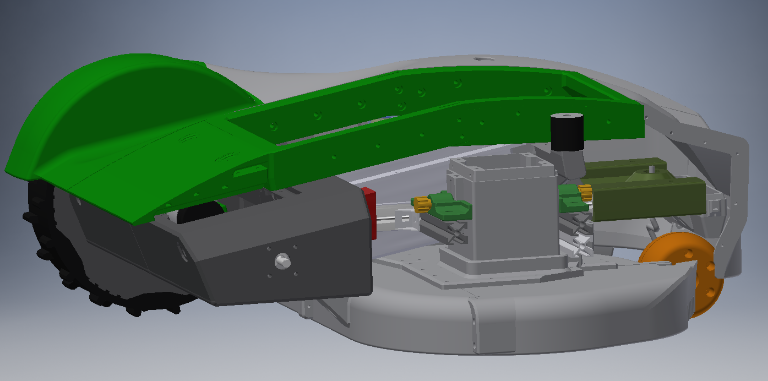
Back part (main part close to wheel) / hintere Teil (das große nahe am Rad)
https://a360.co/2T7n6JD
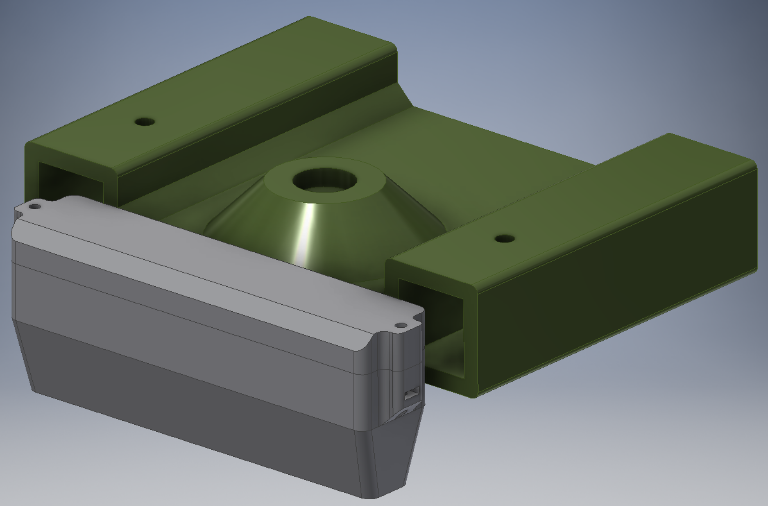
Motor Boxes, lower chassis part / Motorbox, untere Chassis teile
https://a360.co/2EpFCTo
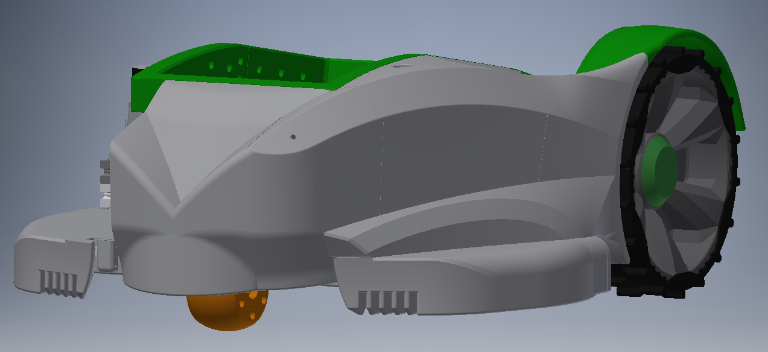
New front(nose), neue Front (Nase)
https://a360.co/2IH0jj2
PCB lid (Camera) PCB Deckel (Kamera)
https://a360.co/2TlbIJ9
Blade protection / Messerschutz
https://a360.co/2Ejde51
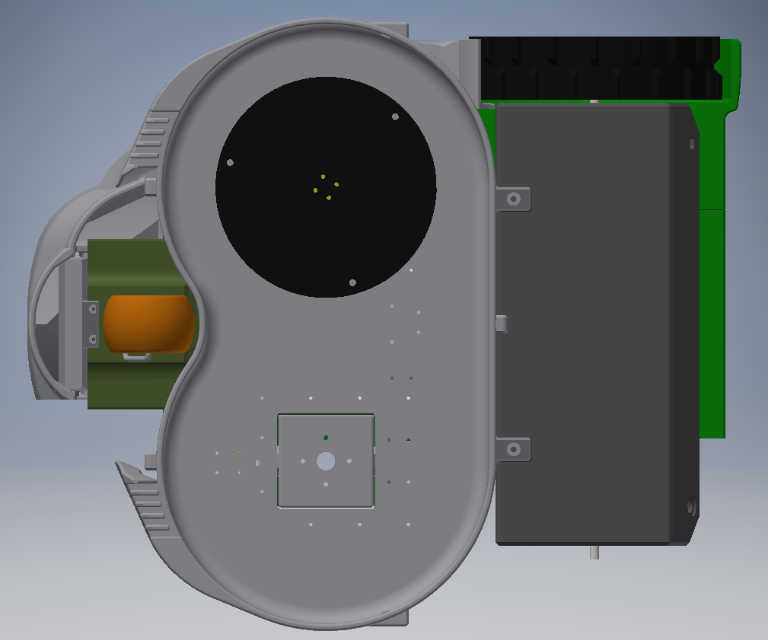
new PCB Box with large battery box / neue Platinenbox mit großem Batteriefach
https://a360.co/2EpFTWq
Silicone damper (mold) / Silikondämpfer (Formen)
https://a360.co/2Tc8GYM
Ich glaube, ihr solltet die Dateien lieber herunter laden, in der Online Vorschau sind viele Körper ausgeblendet. Ich habe mein Arbeiten immer wieder Kopien von dem Original gemacht, so sind leider viele Dateien entstanden, die immer nur einen Teil der Arbeit enthalten.
It seems to be best to download the files instead of preview them online. Online seems to be some parts missing. I used lot of copies of origin project and changed only a few things in each. This results in lot of files which always contain just a few modified parts.But I used comments for documentation.
")




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}