Hi,
Yes, I have access to a 3D printer and a dremel.
The batteries are 2x 24V 4Ah Li-ion (8Ah total) and allthough they seem to work ok, but I have not testet any longer jobs yet.
The mowing area is 200m2 in one area, with a hedges on three sides and the house on the 4th side (see attachement). Obstactles are a the kids' sandpit, vertical metal legs of a trampoline and a slope which the mower motors handles just fine.
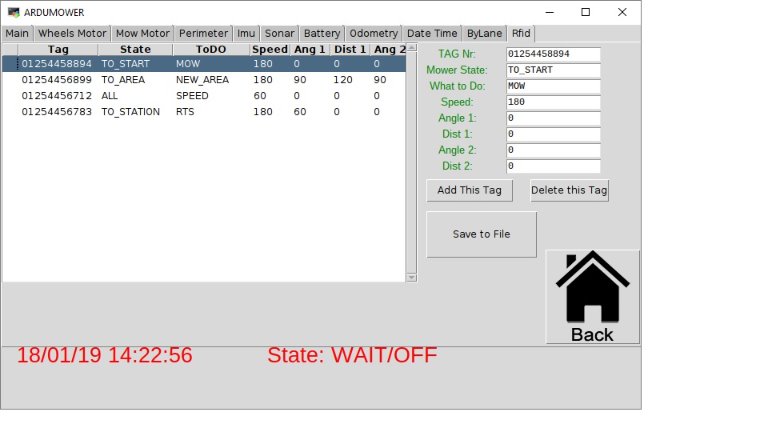
I plan to lay down a perimeter wire all around the edges of the garden, possibly with RFID tags on strategic spots.
I would like to have RFID reading, compass with ok drift correction for lane-by-lane mode within a perimeter and distance sensors (instead / in addition to L600's bumper sensors) to avoid any odd objects I forget to remove before starting the mower program.
When I eventually get the basics of Ardumower working, I will look into the possibilities of adding MQTT over Wifi for remote control and sensor reporting to and from my home automation system. My idea is that this would allow me to basically plan the schedule for mowing according to all sorts of parameters in my HA system, ranging for weather, the number of hours since last rainfall, day of week to avoid upsetting neighbours on Sunday mornings etc etc. I am only a humble copy&paste coder, but hopefully I can get the MQTT up in a "minimum viable product" kind of way
")
I hope this gives meaning, thanks again for responding Bernard
Attachment:
https://forum.ardumower.de/data/media/kunena/attachments/4915/AdrumowerL600garden.PNG/


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}