wortmann30
Member
Hi
Danke für die Info.
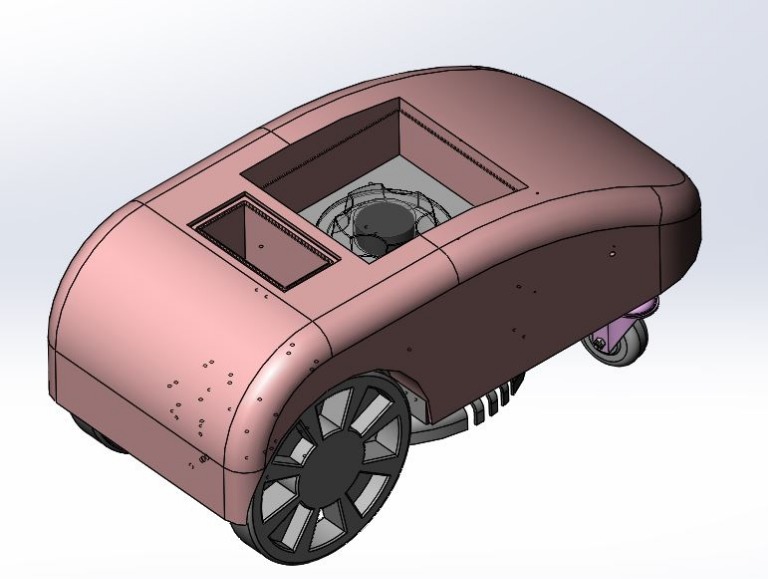
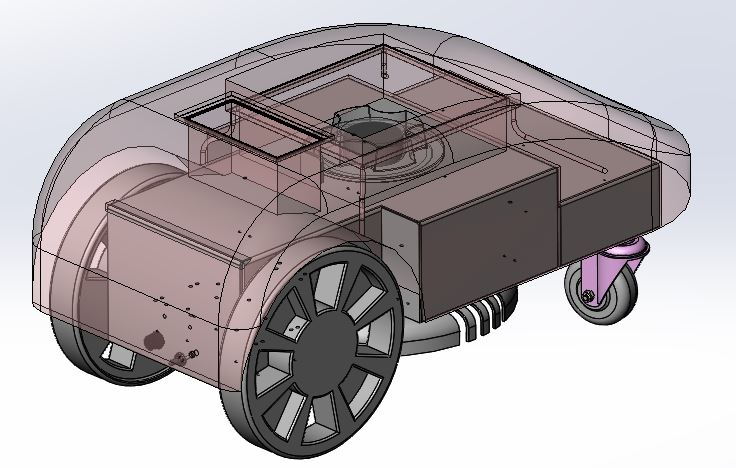
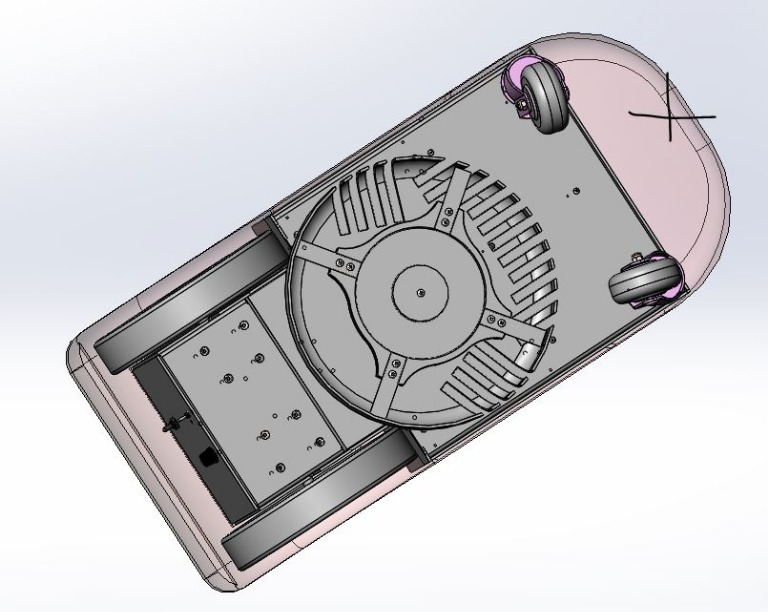
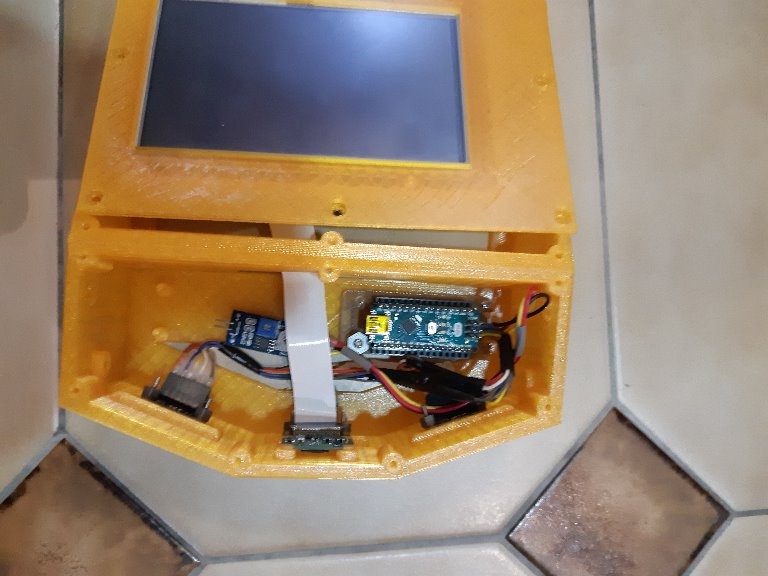
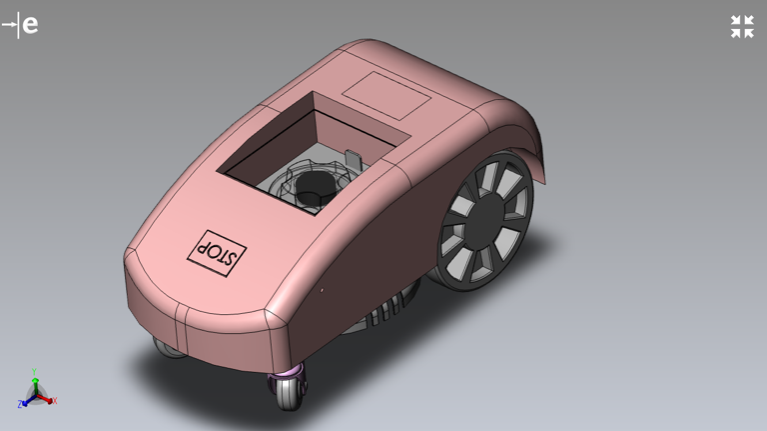
Habe nun mal das Board eingebaut und den Mäher angepasst. Hat nun ne Fläche von ca. 540x310mm.
Was sagt Ihr dazu? Habe ich noch was vergessen zu berücksichtigen von der Elektronik oder was anderem?
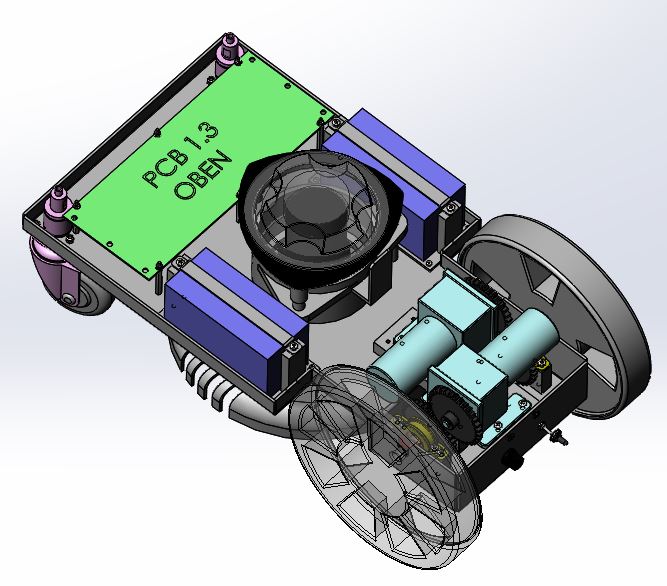
Gruss Marc
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/4707/Mher_4.JPG/
Danke für die Info.
Habe nun mal das Board eingebaut und den Mäher angepasst. Hat nun ne Fläche von ca. 540x310mm.
Was sagt Ihr dazu? Habe ich noch was vergessen zu berücksichtigen von der Elektronik oder was anderem?
Gruss Marc
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/4707/Mher_4.JPG/
Zuletzt bearbeitet von einem Moderator:




")
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}