wortmann30
Member
Hallo zusammen,
ich habe mich entschlossen diesem Projekt hier zu folgen und mir einen Ardumower zu bauen.
Ausgangs Mäher ist für mich ein Denna L600, diesen habe ich günstig erstanden aber defekt. Ich habe bereits die Teile für mich ausgebaut die ich weiter verwenden werde und im CAD modelliert.
Dies sind die Antriebsmotoren, Achsen und Räder, die Front-Räder, das komplette Mähwerk, sowie die Akkus.
Der Rest wird neu. Warum? Weil meine Rasenfläche sehr lang und Schmal ist aber dafür lang. Da kann ich keinen Grossen Globigen Mäher laufen lassen.
Weiter sollte das Mähwerk mit der Mäherbreite übereinstimmen damit bis zum Rand gemäht wird.
In der Beschreibung habe ich gelesen das eine Navigation anhand einer Karte für den Ardumower in Entwicklung ist, wie weit diese Entwicklung derzeit fortgeschritten ist habe ich leider nirgends lesen können.
Vielleicht weiß das ja jemand hier.
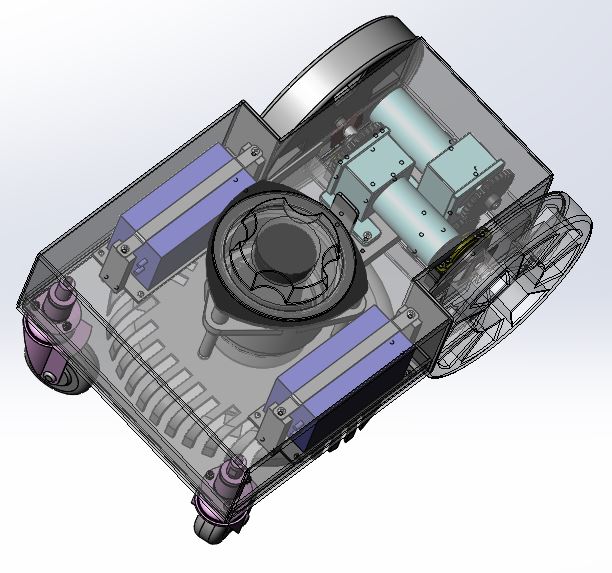
Aber nun mal ein paar Bilder für den ersten Eindruck.
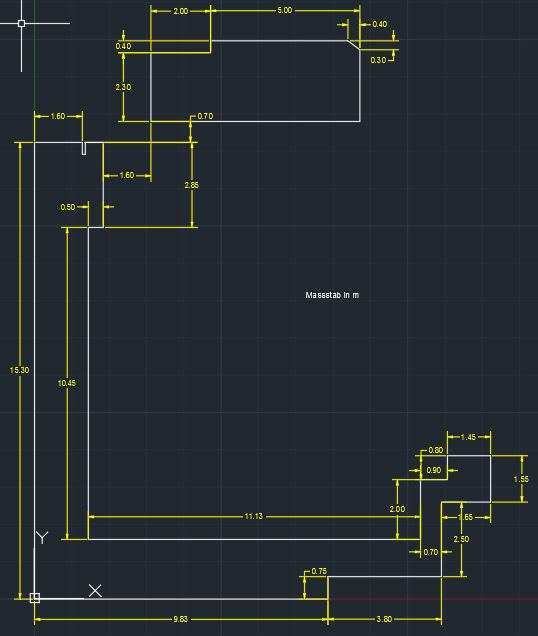
Das ist meine Rasenfläche, es ist auf Zwei ebenen die durch eine Rampe verbunden werden.
Ich weiss es sieht nicht einfach aus. B)
Das Gehäuse ist geplant aus 3mm Alu platten zu machen, oder ist das nicht empfehlenswert?
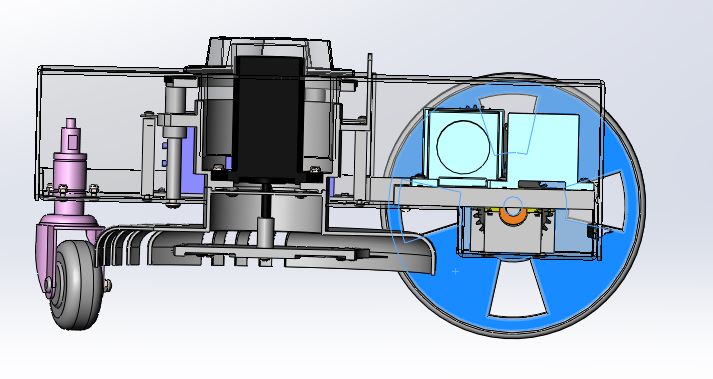
Das ist er im Schnitt.
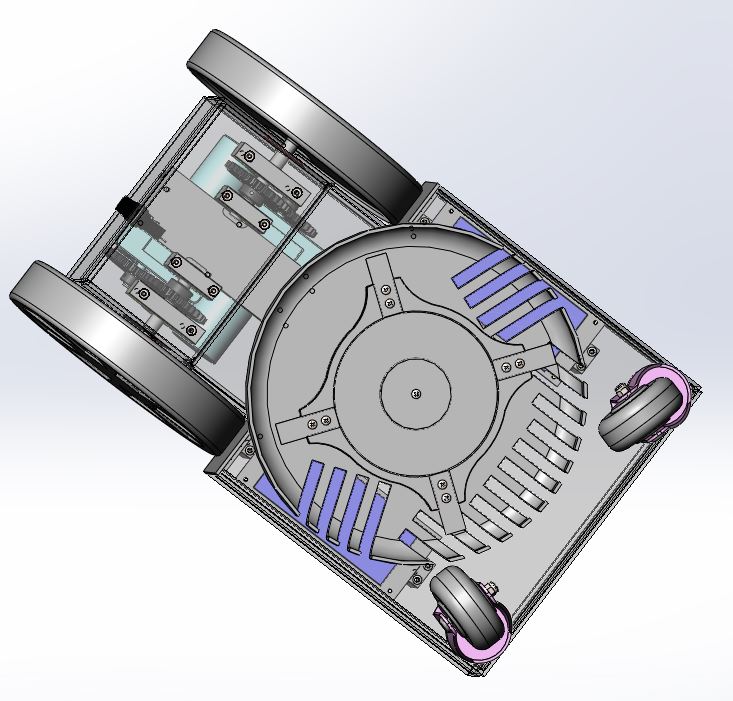
Und von unten.
Grüsse Marc
ich habe mich entschlossen diesem Projekt hier zu folgen und mir einen Ardumower zu bauen.
Ausgangs Mäher ist für mich ein Denna L600, diesen habe ich günstig erstanden aber defekt. Ich habe bereits die Teile für mich ausgebaut die ich weiter verwenden werde und im CAD modelliert.
Dies sind die Antriebsmotoren, Achsen und Räder, die Front-Räder, das komplette Mähwerk, sowie die Akkus.
Der Rest wird neu. Warum? Weil meine Rasenfläche sehr lang und Schmal ist aber dafür lang. Da kann ich keinen Grossen Globigen Mäher laufen lassen.
Weiter sollte das Mähwerk mit der Mäherbreite übereinstimmen damit bis zum Rand gemäht wird.
In der Beschreibung habe ich gelesen das eine Navigation anhand einer Karte für den Ardumower in Entwicklung ist, wie weit diese Entwicklung derzeit fortgeschritten ist habe ich leider nirgends lesen können.
Vielleicht weiß das ja jemand hier.
Aber nun mal ein paar Bilder für den ersten Eindruck.
Das ist meine Rasenfläche, es ist auf Zwei ebenen die durch eine Rampe verbunden werden.
Ich weiss es sieht nicht einfach aus. B)
Das Gehäuse ist geplant aus 3mm Alu platten zu machen, oder ist das nicht empfehlenswert?
Das ist er im Schnitt.
Und von unten.
Grüsse Marc
")



{kind=link}