olli2ardumower
Member
Hallo zusammen,
ich brauche da nochmal einen Tipp der Profis!
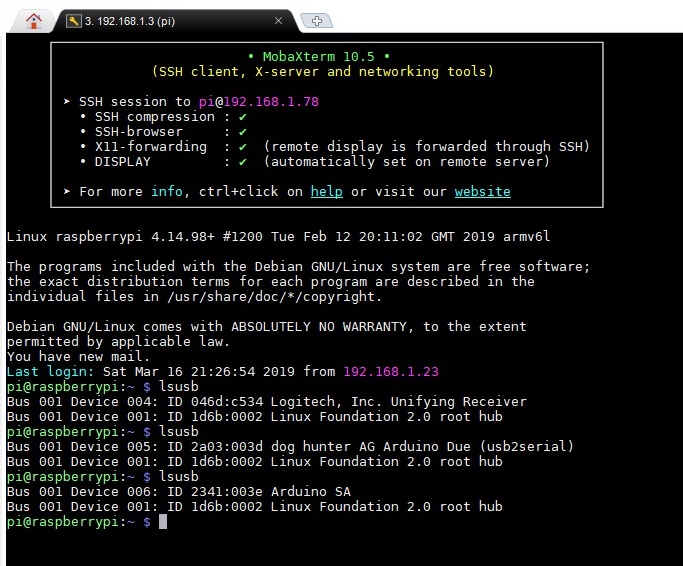
Ich habe an den Pi ein zusätzliches HZ-1050 rfid Modul angebunden auf /dev/ttyAMA0
mit minicom kann ich auf der Schnittstelle auch daten empfangen der leseabstand ist auch top ca. 4cm, sollte in meinen Mower (umgebauter L50) in den hintersten Rasensensor eingebaut werden ca. 2cm über den Boden.
jetzt würde ich gerne das der Mower beim erkennen der Transponder diverse Aktionen ausführen soll!
z.B. beim Home tracken eine Abkürzung fahren oder beim Home tracken bis zur gewünschten Zone fahren und dann in den Auto Modus schalten.
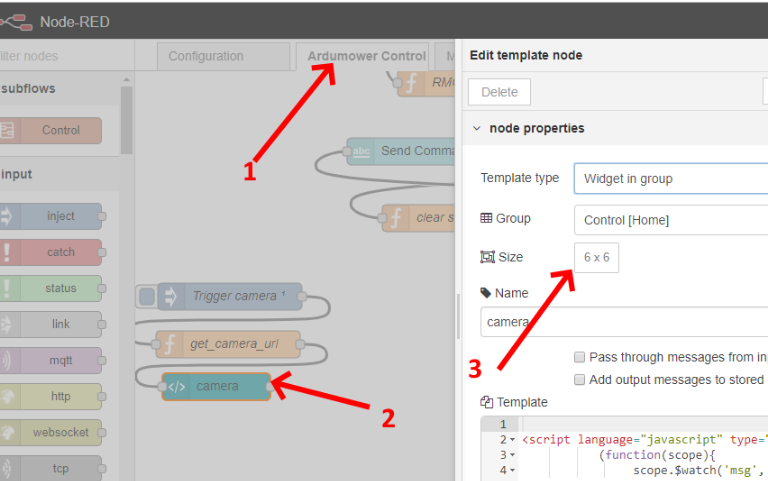
Ich denke das sollte mit Node-RED einfacher zu realisieren sein als in der Firmware direkt ?!?!?!
Außerdem würde ich die 1.0a10 beta Azurit ungerne noch mehr belasten.
Ich denke über die Transponder kann man den Mower auch eine bessere Orientierung auf der Schleife geben als es zu berechnen.
Das HZ-1050 rfid Modul basiert auf 125KHz Technik und somit hat es eh schon einen größeren Leseabstand als die aktuelle 13,56MHz Technik.
Ich wäre froh wenn sich einer der Bastler sich diesem Thema annehmen könnte und mir als Hobby Bastler ein paar Tipps geben könnte wie ich die Schnittstelle im Node-RED auswerten zur Weitergabe der Befehle verbiegen kann.
LG, der Olli aus NRW
ich brauche da nochmal einen Tipp der Profis!
Ich habe an den Pi ein zusätzliches HZ-1050 rfid Modul angebunden auf /dev/ttyAMA0
mit minicom kann ich auf der Schnittstelle auch daten empfangen der leseabstand ist auch top ca. 4cm, sollte in meinen Mower (umgebauter L50) in den hintersten Rasensensor eingebaut werden ca. 2cm über den Boden.
jetzt würde ich gerne das der Mower beim erkennen der Transponder diverse Aktionen ausführen soll!
z.B. beim Home tracken eine Abkürzung fahren oder beim Home tracken bis zur gewünschten Zone fahren und dann in den Auto Modus schalten.
Ich denke das sollte mit Node-RED einfacher zu realisieren sein als in der Firmware direkt ?!?!?!
Außerdem würde ich die 1.0a10 beta Azurit ungerne noch mehr belasten.
Ich denke über die Transponder kann man den Mower auch eine bessere Orientierung auf der Schleife geben als es zu berechnen.
Das HZ-1050 rfid Modul basiert auf 125KHz Technik und somit hat es eh schon einen größeren Leseabstand als die aktuelle 13,56MHz Technik.
Ich wäre froh wenn sich einer der Bastler sich diesem Thema annehmen könnte und mir als Hobby Bastler ein paar Tipps geben könnte wie ich die Schnittstelle im Node-RED auswerten zur Weitergabe der Befehle verbiegen kann.
LG, der Olli aus NRW

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}