paddy
Active member
Hallo zusammen,
im WIKI gibt es seit langem eine Beschreibung zum RMCS, dem Robot mower communication standard. Bisher gab es aber keine Implementierung dazu. Dies habe ich jetzt nachgeholt und möchte euch mein Werk vorstellen. Ihr findet alles im Github unter dem User PaddyCube.
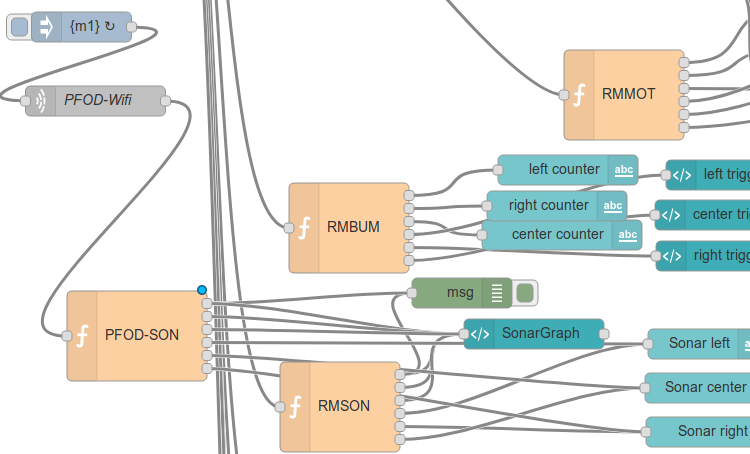
Das Control center basiert auf einem Node-RED Server, der auf einem Raspberry PI ausgeführt wird. Der Raspberry ist im Mower verbaut und kommuniziert mit seriellen Konsole mit dem Mower.
Anbei ein Video https://youtu.be/ayh-IaKrpdM
Man kann hier den Mower überwachen und steuern. Die manuelle Steuerung ist sehr tricky, da der Mower nur wenige Kommandos pro Sekunde über die Konsole verarbeiten kann. Bitte seit damit vorsichtig.
Ich werde in kürze ein kleines Tutorial nachreichen, wie man das Control Center aufsetzt. Es ist wirklich sehr leicht. Für die, die nicht waren können:
1. Raspberry Image auf den PI laden
2. Node-RED installieren
3. Alle Dateien aus dem Git ControlCenter in das .node-red Verzeichnis kopieren
4. node-red starten
Hi there,
in Wiki there is a page called RMCS, robot mower communication standard. But there was no implementation. Now there is one in my fork. You find everything on Github under user PaddyCube.
The control center is a node-red server running on a raspberry pi. The raspberry is inside the mower and communicates with Arduino by serial commands.
Visit the video above to get an picture.
You can observe the mower and also control it. Please be aware that manual control is highly experimental and slow because Arduino can handle only one command per second by console.
I will create a tutorial about how to set everything up, but for those who can't wait:
1. load a raspberry image to SD card
2. install node-red
3. copy everything from git Control center to corresponding .node-red folder
4. start node red
Patrick
im WIKI gibt es seit langem eine Beschreibung zum RMCS, dem Robot mower communication standard. Bisher gab es aber keine Implementierung dazu. Dies habe ich jetzt nachgeholt und möchte euch mein Werk vorstellen. Ihr findet alles im Github unter dem User PaddyCube.
Das Control center basiert auf einem Node-RED Server, der auf einem Raspberry PI ausgeführt wird. Der Raspberry ist im Mower verbaut und kommuniziert mit seriellen Konsole mit dem Mower.
Anbei ein Video https://youtu.be/ayh-IaKrpdM
Man kann hier den Mower überwachen und steuern. Die manuelle Steuerung ist sehr tricky, da der Mower nur wenige Kommandos pro Sekunde über die Konsole verarbeiten kann. Bitte seit damit vorsichtig.
Ich werde in kürze ein kleines Tutorial nachreichen, wie man das Control Center aufsetzt. Es ist wirklich sehr leicht. Für die, die nicht waren können:
1. Raspberry Image auf den PI laden
2. Node-RED installieren
3. Alle Dateien aus dem Git ControlCenter in das .node-red Verzeichnis kopieren
4. node-red starten
Hi there,
in Wiki there is a page called RMCS, robot mower communication standard. But there was no implementation. Now there is one in my fork. You find everything on Github under user PaddyCube.
The control center is a node-red server running on a raspberry pi. The raspberry is inside the mower and communicates with Arduino by serial commands.
Visit the video above to get an picture.
You can observe the mower and also control it. Please be aware that manual control is highly experimental and slow because Arduino can handle only one command per second by console.
I will create a tutorial about how to set everything up, but for those who can't wait:
1. load a raspberry image to SD card
2. install node-red
3. copy everything from git Control center to corresponding .node-red folder
4. start node red
Patrick
")

{kind=link}