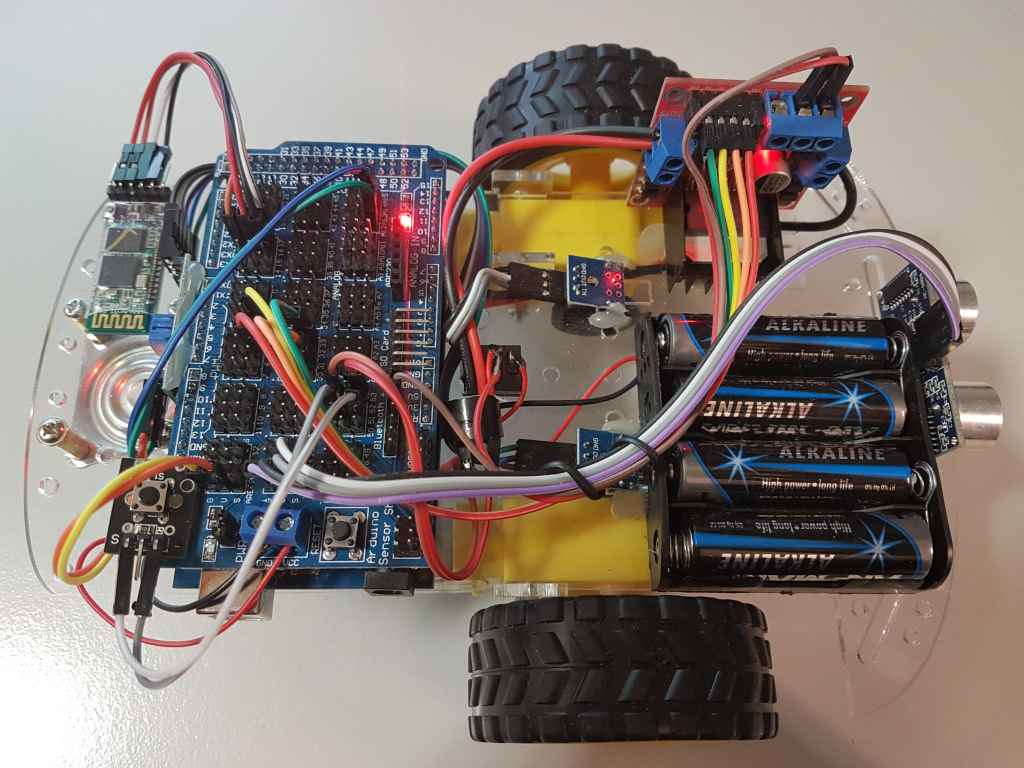
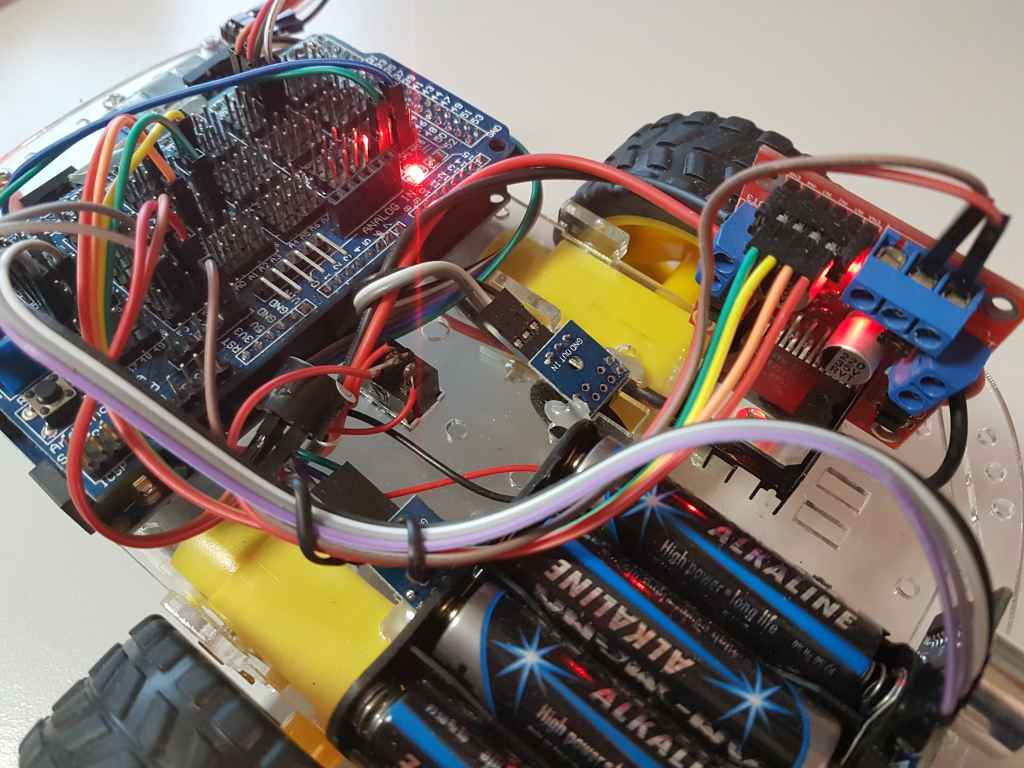
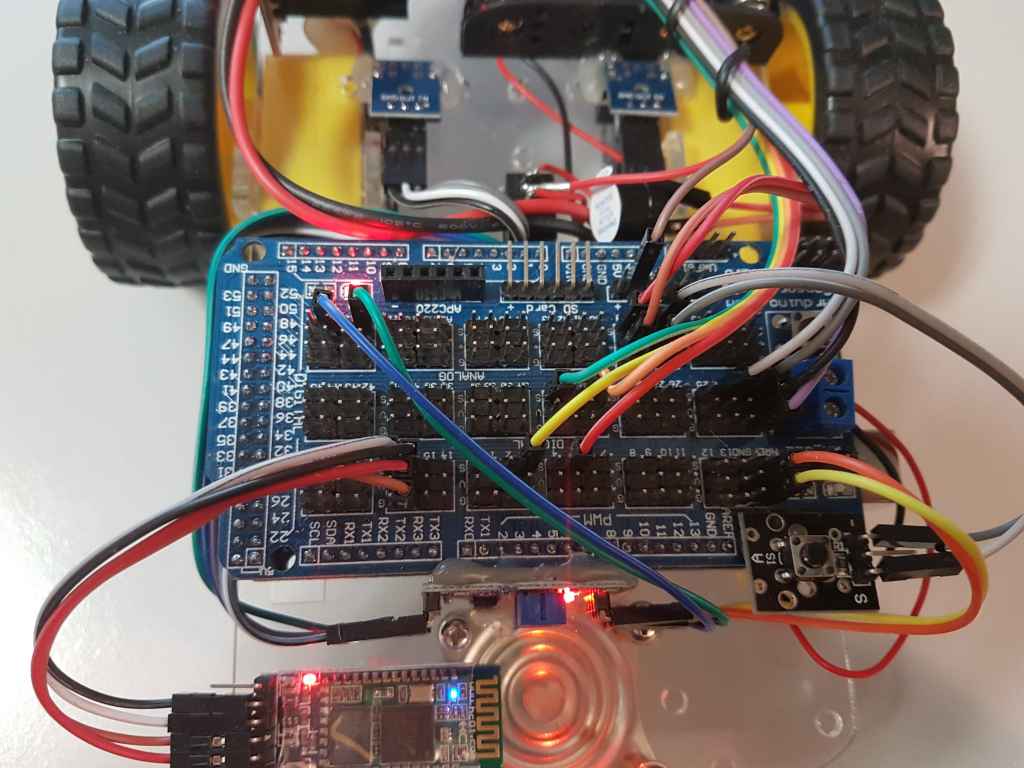
Am Mini sollten nun folgende rote Dioden leuchten: Die PWR-Diode auf dem Sensor-Shield, die Diode auf dem L298N und die Diode auf dem Bluetooth-Modul (blinkt regelmäßigund schnell).
Noch ein paar Kleinigkeiten, bevor es mit dem Bluetooth-Modul weitergeht. Wir öffnen die serielle Konsole des
Arduino über die
Arduino IDE -> Werkzeuge -> serieller Monitor. In der Statusleiste stellen wir die Baudrate auf 19200. Nun können wir die Ausgaben des Ardumower Mini als Text lesen.
Jetzt bocken wir den Mini so auf, dass sich die Motoren frei drehen können.
NACH JEDER DER FOLGENDEN EINGABEN DRÜCKEN WIR DIE
ENTER-TASTE ODER DRÜCKEN SENDEN!
Oben im Fenster geben wir "d" ein und drücken Enter. Die Ausgabe stoppt und ein Menü wird angezeigt. Mit "1" starten wir den Motortest.
Erst wird versucht, mit halber Geschwindigkeit den linken
Motor vorwärts fahren zu lassen, dann mit voller Geschwindigkeit rückwärts. Das Selbe dann mit dem rechten
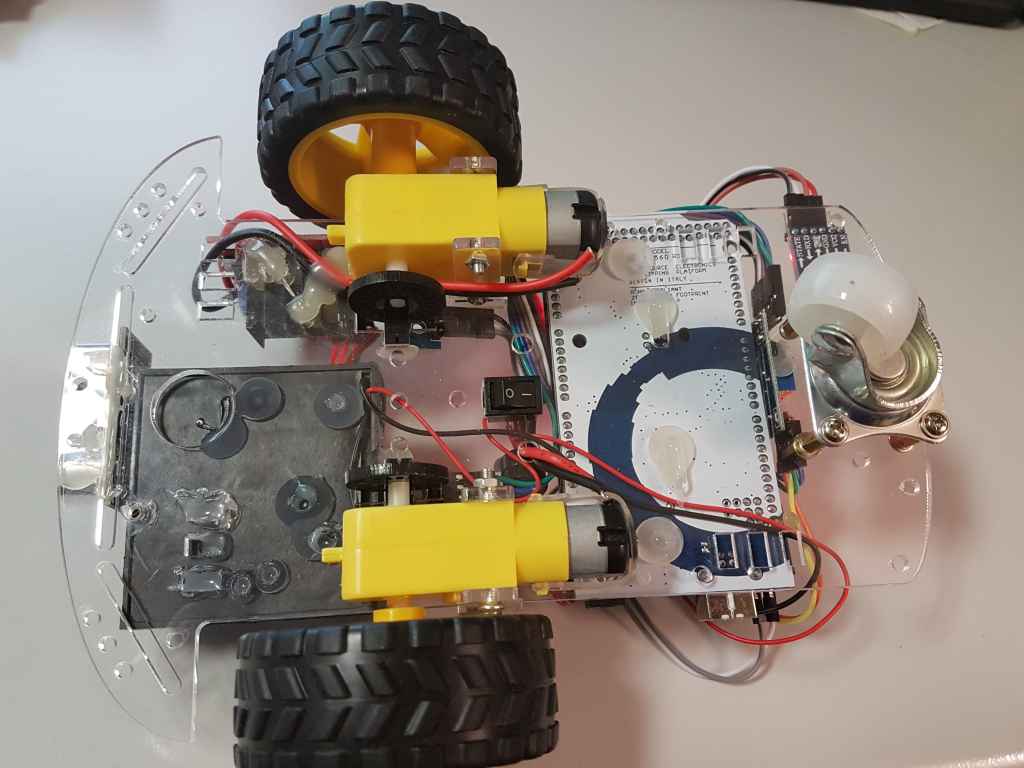
Motor (Fahrtrichtung -> vorne ist da, wo der Ultraschallsensor ist). Werden die falschen Motoren angesteuert oder ist die Drehrichtung falsch, wird entsprechend umverdrahtet. Drehen sich die Räder nicht beim vorwärts Fahren, kann man mit der Hand ein wenig nachhelfen, dann sollten sie laufen.
->Edit: Motoren sollten auch so laufen, sonst stimmt was nicht
Jetzt testen wir die Gabellichtschranken an den Motoren. Diesmal geben wir die "2" ein. Falls die Motoren nicht anlaufen, nochmals nachhelfen - Drehrichtung vorwärts. Die letzten zwei Spalten sollten jetzt hochzählen, wird ein Rad mit der Hand abgebremst, sollte an dieser Seite langsamer hochgezählt werden als auf der Anderen. Ansonsten Kabel der Lichtschranken rechts und links vertauschen. Mit "s" wird der Test gestoppt, mit "0" geht es zurück zum Hauptmenü.
Mit "4" wird noch eine ADC-Kalibrierung gemacht und mit "s" werden die Werte abgespeichert.
->Edit: ADC-Kalibrierung nicht notwendig -> siehe Edit oben
Nun können wir, wie oben bereits beschrieben, mit "3" das Bluetooth-Modul in Betrieb nehmen.
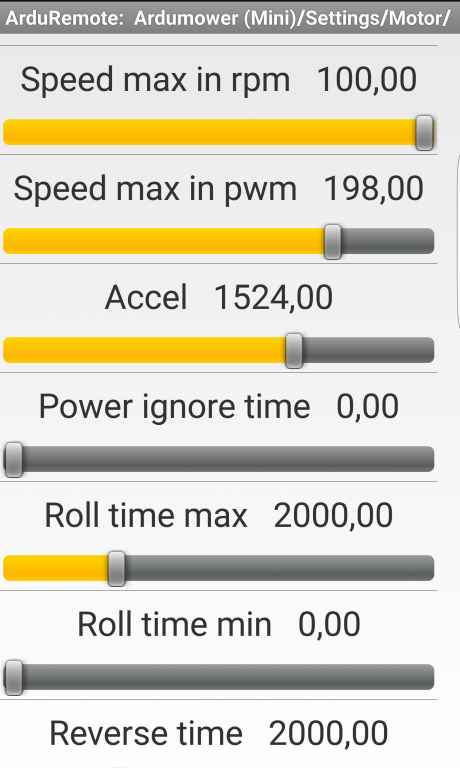
Um den Ardu Mini zu konfigurieren, speziell die Motoren, laden wir uns die App ArduRemote (kostenlos) oder pfodApp (kostet ca. 8Euro) auf unser Handy herunter.
Nach dem Start der App müssen wir den "Mini" mit unserem Handy "pairen". Der Pin, soweit nicht geändert, lautet 1234. Wenn das Handy mit dem Mini verbunden ist, blinkt die rote LED immer wieder 2 mal kurz, dann Pause. In der App sollte nun das Ardumower-Menü zu sehen sein.
Dazu mehr im nächsten Post.
")











{kind=link}
{kind=link}
{kind=link}