Nachdem ich nun die ersten Pattern berechnen habe lassen, sind mir ein paar Punkte aufgefallen, die meiner Meinung nach optimiert werden sollten, um den Rover möglichst effizient (Zeit + Akku) und rasenschonend mähen zu lassen.
Nachtrag: Perimeter und Bahnen um Exclusions herum sind für mich völlig gleichwertig. Beide können an harten Grenzen entlang führen.
Auch wenn ich manchmal nur "Perimeter" nenne meine ich eigentlich immer die Ecxlusions mit.
1. Das Perimeter (und eben auch die Exclusionbahn) wird sehr oft genutzt um von einem Punkt an einen anderen zu gelangen:
 so fährt der Rover manchmal drei oder vier Fahrten am Perimeter (+ Excl.) entlang. Dadurch wird genau diese Strecke, die ja sowieso immer gleich befahren werden muss, egal welches Pattern berechnet wurde, zusätzlich belastet. Fahrspuren im Rasen sind so wahrscheinlich.
so fährt der Rover manchmal drei oder vier Fahrten am Perimeter (+ Excl.) entlang. Dadurch wird genau diese Strecke, die ja sowieso immer gleich befahren werden muss, egal welches Pattern berechnet wurde, zusätzlich belastet. Fahrspuren im Rasen sind so wahrscheinlich.
2. (dieser Punkt hat sich erledigt! Danke Alexander.)
beim Linien-Pattern wird keine "Serpentine" gefahren, sondern dieses Muster, welches ich zur Verdeutlichung mal auseinandergezogen hab:

an den roten Pfeilen macht er eine 180° Kehrtwende und fährt wieder ein Stück zurück, um dann wieder in die Querfahrt abzubiegen. Dadurch wird der Rasen an dieser Stelle, die auch bei anderen Patternabständen immer ungefähr an derselben Stelle liegen, mehr belastet. Außerdem ist das eine zusätzliche Fahrt und braucht wieder Zeit beim Drehen.
3. manche Stellen werden vielleicht gar nicht gemäht, weil bei der Berechnung wegen des Linienabstandes Stellen ausgelassen werden:
 die roten Linien zeigen ungefähr an, welche Patternlinie noch fehlen würde.
die roten Linien zeigen ungefähr an, welche Patternlinie noch fehlen würde.
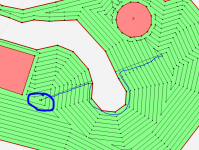
4. um an noch fehlende Stellen zu gelangen, berechnet die App manchmal recht lange Wege. Dabei berechnet die App die direkte Verbindung. Wenn diese dann auf den Perimeter trifft wird dieser so lange umfahren, bis er die direkte Verbindung auf der anderen Seite des Grundstücks wieder trifft.

Ich habe mal die Patternlinien, die über lange Strecken auf dem Perimeter lagen, auseinandergezogen und so angeordnet, wie sie eigentlich fahren wollten. Die blauen dicken Linien zeigen die direkte Verbindung der beiden Bereiche. Da der Rover so ja nicht fahren kann, wird die Verbindung am Perimeter entlang gelegt.
Die Linien, die jetzt außerhalb der Karte zu sehen sind, liegen normalerweise auf dem Perimeter. Damit entstehen dort zusätzliche Fahrten wie unter Punkt 1 oben.
5. Enge Passagen werden manchmal nicht mit berechnet:
 vielleicht ein Extrembeispiel (welches aber durchaus auch auftreten kann, wenn man kein Trampolin hat)
vielleicht ein Extrembeispiel (welches aber durchaus auch auftreten kann, wenn man kein Trampolin hat)
Durch die enge Passage hindurch wird kein Pattern berechnet (schraffierte Fläche), wenn das so wie auf dem oberen Bild als Exclusion ausgenommen wird.
(die Linien entlang der Kontur habe ich zur besser Sichtbarkeit auseinandergezogen.)
Wird der Perimeter so entlang gelegt, dann erfolgt die Berechnung problemlos:

6. da derzeit der Perimeter oft für Fahrten an andere Stellen genutzt wird, gibt es folglich auch viele Stellen, an denen der Perimeter (+ Excl) wieder verlassen werden muss:
 ich hab die Stellen mal blau eingekreist. Da die Stellen bei jeder Berechnung anders liegen können, ist es auch nicht möglich immer genug Freiraum zum Drehen zu schaffen. Da der Perimeter oft hart an mechanischen Grenzen liegen muss, ist eine Drehung hier oft überhaupt nicht möglich.
ich hab die Stellen mal blau eingekreist. Da die Stellen bei jeder Berechnung anders liegen können, ist es auch nicht möglich immer genug Freiraum zum Drehen zu schaffen. Da der Perimeter oft hart an mechanischen Grenzen liegen muss, ist eine Drehung hier oft überhaupt nicht möglich.
7. Es werden manche Fahrten am Perimeter entlang unnötig gemacht:
 Wieder das Extrembeispiel "Trampolin": hier fährt der Rover einmal im Uhrzeigersinn um den Kreis herum um dann umzukehren und wieder gegen den Uhrzeigersinn herauszufahren. Diese Fahrt wäre eigentlich nicht nötig gewesen.
Wieder das Extrembeispiel "Trampolin": hier fährt der Rover einmal im Uhrzeigersinn um den Kreis herum um dann umzukehren und wieder gegen den Uhrzeigersinn herauszufahren. Diese Fahrt wäre eigentlich nicht nötig gewesen.
8. manchmal wird eine 180° Kehrtwende auf dem Perimeter oder einer Exclusionbahn berechnet. (siehe Bild aus #7)
Das sollte auf dem Perimeter (oder Ecxlusion) nie der Fall sein. Meist führen diese Bahnen direkt an harten Grenzen entlang und dann kann der Rover dort nicht drehen. Diese Stellen findet man auch nicht so leicht. Das merkt man dann wahrscheinlich erst, wenn er sich beim Umdrehen schon eingegraben hat.
Vorschläge:
1. eliminiert Pkte: 1, (3), 4, 6, 7:
das Perimeter sollte eigentlich nur einmal, idealerweise an einem wählbaren Punkt angefahren, idealerweise in einer wählbaren Richtung (asymmetrisches Mähwerk) befahren werden und dann an einer wählbaren Stelle ins Pattern abgebogen werden. Exclusions sollten dabei genau so behandelt werden wie der Perimeter.
Als vorübergehende Lösung, bis wählbare Übergänge programmiert sind, könnte man vielleicht nur in 45° Winkeln von den Perimeter- und Exclusionbahnen abfahren. Das schafft der Rover auch an harten Grenzen.
An Engstellen könnte genau zwischen den Perimeterlinien hindurch gefahren werden. So wird an diesen Stellen auch gemäht, wenn der Abstand eigentlich keine Patternlinien mehr berechnen ließe (Pkt. 3)
2. eliminiert Pkt. 4
wenn es geht, sollten große Bereiche erst fertig gemäht werden, bevor andere angefahren werden. So wird vermieden, dass wegen kleinen, noch fehlenden Bereichen, nochmal durch das ganze Grundstück gefahren werden muss.
3. Fahrten in die Ladestation sollten auch nicht am Perimeter entlang, sondern auf kürzestem Weg erfolgen. Dazu kann ich aber noch nichts sagen, weil ich noch keine Ladestation hab.
Vielleicht ist ja das Eine oder Andere irgendwann umsetzbar.")
Nachtrag: Perimeter und Bahnen um Exclusions herum sind für mich völlig gleichwertig. Beide können an harten Grenzen entlang führen.
Auch wenn ich manchmal nur "Perimeter" nenne meine ich eigentlich immer die Ecxlusions mit.
1. Das Perimeter (und eben auch die Exclusionbahn) wird sehr oft genutzt um von einem Punkt an einen anderen zu gelangen:
so fährt der Rover manchmal drei oder vier Fahrten am Perimeter (+ Excl.) entlang. Dadurch wird genau diese Strecke, die ja sowieso immer gleich befahren werden muss, egal welches Pattern berechnet wurde, zusätzlich belastet. Fahrspuren im Rasen sind so wahrscheinlich.2. (dieser Punkt hat sich erledigt! Danke Alexander.)
beim Linien-Pattern wird keine "Serpentine" gefahren, sondern dieses Muster, welches ich zur Verdeutlichung mal auseinandergezogen hab:
an den roten Pfeilen macht er eine 180° Kehrtwende und fährt wieder ein Stück zurück, um dann wieder in die Querfahrt abzubiegen. Dadurch wird der Rasen an dieser Stelle, die auch bei anderen Patternabständen immer ungefähr an derselben Stelle liegen, mehr belastet. Außerdem ist das eine zusätzliche Fahrt und braucht wieder Zeit beim Drehen.
3. manche Stellen werden vielleicht gar nicht gemäht, weil bei der Berechnung wegen des Linienabstandes Stellen ausgelassen werden:
die roten Linien zeigen ungefähr an, welche Patternlinie noch fehlen würde.4. um an noch fehlende Stellen zu gelangen, berechnet die App manchmal recht lange Wege. Dabei berechnet die App die direkte Verbindung. Wenn diese dann auf den Perimeter trifft wird dieser so lange umfahren, bis er die direkte Verbindung auf der anderen Seite des Grundstücks wieder trifft.
Ich habe mal die Patternlinien, die über lange Strecken auf dem Perimeter lagen, auseinandergezogen und so angeordnet, wie sie eigentlich fahren wollten. Die blauen dicken Linien zeigen die direkte Verbindung der beiden Bereiche. Da der Rover so ja nicht fahren kann, wird die Verbindung am Perimeter entlang gelegt.
Die Linien, die jetzt außerhalb der Karte zu sehen sind, liegen normalerweise auf dem Perimeter. Damit entstehen dort zusätzliche Fahrten wie unter Punkt 1 oben.
5. Enge Passagen werden manchmal nicht mit berechnet:
vielleicht ein Extrembeispiel (welches aber durchaus auch auftreten kann, wenn man kein Trampolin hat)Durch die enge Passage hindurch wird kein Pattern berechnet (schraffierte Fläche), wenn das so wie auf dem oberen Bild als Exclusion ausgenommen wird.
(die Linien entlang der Kontur habe ich zur besser Sichtbarkeit auseinandergezogen.)
Wird der Perimeter so entlang gelegt, dann erfolgt die Berechnung problemlos:
6. da derzeit der Perimeter oft für Fahrten an andere Stellen genutzt wird, gibt es folglich auch viele Stellen, an denen der Perimeter (+ Excl) wieder verlassen werden muss:
ich hab die Stellen mal blau eingekreist. Da die Stellen bei jeder Berechnung anders liegen können, ist es auch nicht möglich immer genug Freiraum zum Drehen zu schaffen. Da der Perimeter oft hart an mechanischen Grenzen liegen muss, ist eine Drehung hier oft überhaupt nicht möglich.7. Es werden manche Fahrten am Perimeter entlang unnötig gemacht:
Wieder das Extrembeispiel "Trampolin": hier fährt der Rover einmal im Uhrzeigersinn um den Kreis herum um dann umzukehren und wieder gegen den Uhrzeigersinn herauszufahren. Diese Fahrt wäre eigentlich nicht nötig gewesen.8. manchmal wird eine 180° Kehrtwende auf dem Perimeter oder einer Exclusionbahn berechnet. (siehe Bild aus #7)
Das sollte auf dem Perimeter (oder Ecxlusion) nie der Fall sein. Meist führen diese Bahnen direkt an harten Grenzen entlang und dann kann der Rover dort nicht drehen. Diese Stellen findet man auch nicht so leicht. Das merkt man dann wahrscheinlich erst, wenn er sich beim Umdrehen schon eingegraben hat.
Vorschläge:
1. eliminiert Pkte: 1, (3), 4, 6, 7:
das Perimeter sollte eigentlich nur einmal, idealerweise an einem wählbaren Punkt angefahren, idealerweise in einer wählbaren Richtung (asymmetrisches Mähwerk) befahren werden und dann an einer wählbaren Stelle ins Pattern abgebogen werden. Exclusions sollten dabei genau so behandelt werden wie der Perimeter.
Als vorübergehende Lösung, bis wählbare Übergänge programmiert sind, könnte man vielleicht nur in 45° Winkeln von den Perimeter- und Exclusionbahnen abfahren. Das schafft der Rover auch an harten Grenzen.
An Engstellen könnte genau zwischen den Perimeterlinien hindurch gefahren werden. So wird an diesen Stellen auch gemäht, wenn der Abstand eigentlich keine Patternlinien mehr berechnen ließe (Pkt. 3)
2. eliminiert Pkt. 4
wenn es geht, sollten große Bereiche erst fertig gemäht werden, bevor andere angefahren werden. So wird vermieden, dass wegen kleinen, noch fehlenden Bereichen, nochmal durch das ganze Grundstück gefahren werden muss.
3. Fahrten in die Ladestation sollten auch nicht am Perimeter entlang, sondern auf kürzestem Weg erfolgen. Dazu kann ich aber noch nichts sagen, weil ich noch keine Ladestation hab.
Vielleicht ist ja das Eine oder Andere irgendwann umsetzbar.
Anhänge

Zuletzt bearbeitet:


