Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Probleme/Fehler/Wünsche/Ideen
- Ersteller markus
- Erstellt am
Kann das sein das diverse Anhäänge nicht funktionieren. Ich habe hier ein paar Themen durchgelsen bei denen Anhäänge dabei sind die nicht geöffnet werden können. Ich habe es nicht im Kopf aber das eine vom autego es waren mehrere Bilder.
Ich bin angemeldet es lag nicht an der Gast Berechtigung.
Ich bin angemeldet es lag nicht an der Gast Berechtigung.
markus-lbon-facebook
New member
Hi Meddie,
das ist leider noch vereinzelt so, das Projekt ist eigentlich auf einer anderen Seite gestartet und vor kurzem hier her umgezogen. Dabei ist das wohl passiert. Ich werde heute nochmal über die Verzeichnisse schauen.
Gruß Markus
das ist leider noch vereinzelt so, das Projekt ist eigentlich auf einer anderen Seite gestartet und vor kurzem hier her umgezogen. Dabei ist das wohl passiert. Ich werde heute nochmal über die Verzeichnisse schauen.
Gruß Markus
Da wir beim Thema Fähigkeiten sind. Wollt Ihr Eure Webseite etwas verbessern?
Soweit ich das sehe ist die Webseite auf einer QNAP Turbonas TS-419P II drauf, und läuft über einen normalen DSL Anschluß. Das erklärt auch warum die Webseite so langsam ist.
Und am Forum gehören auch ein Paar Sachen ganz dringend eingestellt.
Ich sehe keine Suche. Wie soll man hier im Forum etwas finden wenn es keine Suche dafür gibt.
Auch wäre ein Button der die neuesten Beiträge anzeigt recht.
Wer ist eigentlich der Super User? Auch wenn der Super User ein Super USer ist, sollte der NAme auf einen Normalen Namen geändert werden, denn dieser lockt direkt auf ein Versuch den Account zu knacken ein.
Sieht das bitte nicht negativ, das ist nicht böse gemeint.
Wenn Ihr wollte ich kann Euch dabei helfen.
Gruß Eddie
Soweit ich das sehe ist die Webseite auf einer QNAP Turbonas TS-419P II drauf, und läuft über einen normalen DSL Anschluß. Das erklärt auch warum die Webseite so langsam ist.
Und am Forum gehören auch ein Paar Sachen ganz dringend eingestellt.
Ich sehe keine Suche. Wie soll man hier im Forum etwas finden wenn es keine Suche dafür gibt.
Auch wäre ein Button der die neuesten Beiträge anzeigt recht.
Wer ist eigentlich der Super User? Auch wenn der Super User ein Super USer ist, sollte der NAme auf einen Normalen Namen geändert werden, denn dieser lockt direkt auf ein Versuch den Account zu knacken ein.
Sieht das bitte nicht negativ, das ist nicht böse gemeint.
Wenn Ihr wollte ich kann Euch dabei helfen.
Gruß Eddie
markus-lbon-facebook
New member
Ja hier gibt es noch einige Baustellen, wir sind dran. ")
EDIT "Suche" ich denke die Suche oben im Kopf der Seite sollte reichen, ich könnte Links ins Menü noch ein Link auf die Suche erstellen. Aber eigentlich reicht die normale Suchfunktion hier.
EDIT2 Mit der Navigationsleiste ist eine Suche oder Anzeige der letzten Beiträge (Aktuell) möglich
EDIT "Suche" ich denke die Suche oben im Kopf der Seite sollte reichen, ich könnte Links ins Menü noch ein Link auf die Suche erstellen. Aber eigentlich reicht die normale Suchfunktion hier.
EDIT2 Mit der Navigationsleiste ist eine Suche oder Anzeige der letzten Beiträge (Aktuell) möglich
Danke für den Tipp, durch die Umstellung der Namens-Anzeige im Forum ist dieser Name Aufgetaucht.Wer ist eigentlich der Super User?
markus-lbon-facebook
New member
Hi meddie,
unsere beiden Beiträge sind einer Umstellung zum Opfer gefallen. Aber wegen der Nav.-Leiste über dem Forum, Du hast recht die war gestern noch nicht da, Optik ist also in Ordnung.
unsere beiden Beiträge sind einer Umstellung zum Opfer gefallen. Aber wegen der Nav.-Leiste über dem Forum, Du hast recht die war gestern noch nicht da, Optik ist also in Ordnung.
markus-lbon-facebook
New member
Ja, das Thema ist noch etwas Vernachlässigt geblieben. Bisher haben wir immer mit vorhandenem Material gearbeitet aber mit den Neu Aufbauten wir das auch noch ein Thema. Im Moment habe ich es wie vorgeschlagen bei der "Ladeelektronik" mit rein genommen. Ist ja noch nicht so viel los hier.meddie schrieb:Ich würde mir noch ein Unterforum für Akkutechnik wünschen bzw. den Bereich für Ladeelektronik erweitern.
Gruß Eddie
Zuletzt bearbeitet von einem Moderator:
markus-lbon-facebook
New member
Du hast Post
markus-lbon-facebook
New member
Gernemeddie schrieb:Wie sieht es mit Privaten Nachrichten aus?
sollte so gehen.
Zuletzt bearbeitet von einem Moderator:
markus-lbon-facebook
New member
Markus schrieb:Gernemeddie schrieb:Wie sieht es mit Privaten Nachrichten aus?
sollte so gehen.
Ist im Moment raus genommen, wird aber wieder Aktiviert.
Dauert aber noch etwas.
Zuletzt bearbeitet von einem Moderator:
helldriver
Member
Hallo,
nachdem ich am Wochenende ein bisschen Zeit zum testen hatte, sind mir ein paar Dinge aufgefallen.
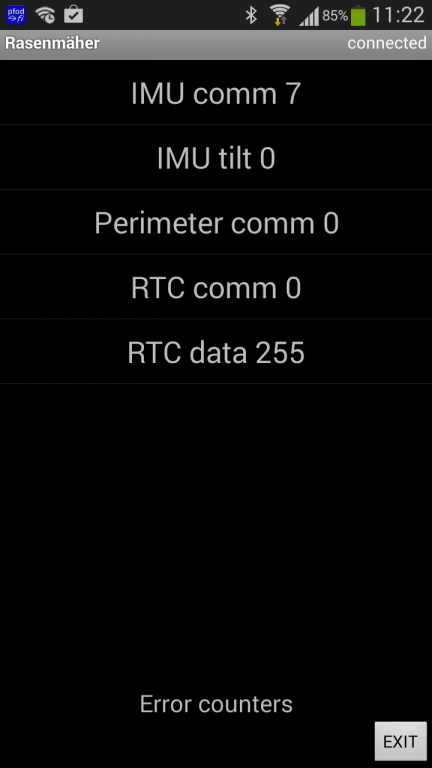
1. Ich habe immer wieder nach dem Einschalten mehrere Signaltöne. Also Fehler. In der Pfod-App unter Error counters stelle ich dann Fehler bei RTC data fest. Die Fehler IMU comm stehen immer bei 7. Das scheint aber normal zu sein und stört auch nicht den Betrieb. Nach stellen der Uhr geht es wieder eine gewisse Zeit. Kann dies evtl. an der Stützbatterie vom RTC liegen?
2. Wenn der Mower am laden ist, hängt er sich Zeitweise auf. Das heißt es ist keine Kommunikation via Pfod-App mehr möglich. Mir ist leider bisher nicht gelungen diesen Fehler genauer zu bestimmen. Soll heißen, Zeit oder Ladezustand ist immer unterschiedlich. Manchmal geht es auch ohne Fehler jedoch ist er noch nie von selber wieder zum Dienst ausgerückt. Mit dem original Tianchen-Board ist er immer ca. 5-6 Stunden in der Ladeschale gewesen und dann für ca. 1-2 Stunden aus der Schicht gewesen bis er dann selbstständig zum Laden gefahren ist. Auch wenn ich Mähzeiten festlege werden diese ignoriert. Evtl. hängt es ja mit Punkt 1 zusammen.
3. Ich habe nun auch die Sound-Module vom Schleifenempfänger in die neuen geändert. Das erkennen funktioniert nun deutlich besser. In der Pfod-App ist der Wert beinahe verdoppelt. Doch ein abfahren der Schleife ist noch nicht möglich.
Ich habe hier im Forum irgendwo gelesen, das man den Kondensator überbrücken sollte. Dies habe ich nicht gemacht und es funktioniert denn noch. Sollte ich diesen trotzdem überbrücken?
4. Nur noch so eine Idee. Sollte man nicht besser zur Sicherheit noch eine Sicherung in der 5V Leitung nach dem Step-down Modul einplanen? Z.B. 4A. Ich hatte letzte Woche leider ein Problem wo durch einen Kurzschluß mein Step-down-Modul abgeraucht ist. Wenn der Mäher irgendwann mal ganz selbstständig und ohne Aufsicht laufen sollte finde ich das schon als wichtigen Punkt.
Gruß
Stephan
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/921/Screenshot_2014-04-06-11-22-32.png/
nachdem ich am Wochenende ein bisschen Zeit zum testen hatte, sind mir ein paar Dinge aufgefallen.
1. Ich habe immer wieder nach dem Einschalten mehrere Signaltöne. Also Fehler. In der Pfod-App unter Error counters stelle ich dann Fehler bei RTC data fest. Die Fehler IMU comm stehen immer bei 7. Das scheint aber normal zu sein und stört auch nicht den Betrieb. Nach stellen der Uhr geht es wieder eine gewisse Zeit. Kann dies evtl. an der Stützbatterie vom RTC liegen?
2. Wenn der Mower am laden ist, hängt er sich Zeitweise auf. Das heißt es ist keine Kommunikation via Pfod-App mehr möglich. Mir ist leider bisher nicht gelungen diesen Fehler genauer zu bestimmen. Soll heißen, Zeit oder Ladezustand ist immer unterschiedlich. Manchmal geht es auch ohne Fehler jedoch ist er noch nie von selber wieder zum Dienst ausgerückt. Mit dem original Tianchen-Board ist er immer ca. 5-6 Stunden in der Ladeschale gewesen und dann für ca. 1-2 Stunden aus der Schicht gewesen bis er dann selbstständig zum Laden gefahren ist. Auch wenn ich Mähzeiten festlege werden diese ignoriert. Evtl. hängt es ja mit Punkt 1 zusammen.
3. Ich habe nun auch die Sound-Module vom Schleifenempfänger in die neuen geändert. Das erkennen funktioniert nun deutlich besser. In der Pfod-App ist der Wert beinahe verdoppelt. Doch ein abfahren der Schleife ist noch nicht möglich.
Ich habe hier im Forum irgendwo gelesen, das man den Kondensator überbrücken sollte. Dies habe ich nicht gemacht und es funktioniert denn noch. Sollte ich diesen trotzdem überbrücken?
4. Nur noch so eine Idee. Sollte man nicht besser zur Sicherheit noch eine Sicherung in der 5V Leitung nach dem Step-down Modul einplanen? Z.B. 4A. Ich hatte letzte Woche leider ein Problem wo durch einen Kurzschluß mein Step-down-Modul abgeraucht ist. Wenn der Mäher irgendwann mal ganz selbstständig und ohne Aufsicht laufen sollte finde ich das schon als wichtigen Punkt.
Gruß
Stephan
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/921/Screenshot_2014-04-06-11-22-32.png/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
Hallo Stpehan,
1. Das RTC data Problem sollte zunächst gelöst werden. Ich vermute es liegt an der Kabelführung und/oder zu langen Kabeln (SCL/SDA). Die Kabel auf ein Minimun reduzieren und verdrillen. Dann sollte der Fehler hoffentlich weggehen.
2. Das Nicht Ausrücken hänt mit 1. zusammen bzw. der Timer ist noch Beta - ich bin einfach noch nicht dazu gekommen, das ganze ausführlich zu testen. Es gibt gerade zu viele andere Baustellen - das Thema Timer wird demnächst weiter ausgearbeitet...
3. Geht es wenn Du ihn direkt auf die Schleife setzt und dann in der pfodApp->Commands->Track wählst? Falls es dann geht, klappt das "Einfahren" noch nicht. Das Einfahren ist ein Punkt der noch verbessert werden muss. Falls es grundsätzlich nicht abfahren kann (Track), müssen die Spulen ggf. besser angeordnet werden (Details siehe auf der Projektseite). Ggf. müssen die Track-Parameter (pfodApp->Settings->Perimeter PID) modifiziert, so dass es geht.
4. Ein Kurzschluß sollte eigentlich dazu führen, dass die Hauptsicherung durchbrennt - evtl. Sicherung zu groß gewählt? Die Sicherung sollte evtl. verkleinert werden. Ich baue noch einen Verpolungsschutz (und verkleinerte Sicherung) in das Schildbild ein...
Gruss,
Alexander
1. Das RTC data Problem sollte zunächst gelöst werden. Ich vermute es liegt an der Kabelführung und/oder zu langen Kabeln (SCL/SDA). Die Kabel auf ein Minimun reduzieren und verdrillen. Dann sollte der Fehler hoffentlich weggehen.
2. Das Nicht Ausrücken hänt mit 1. zusammen bzw. der Timer ist noch Beta - ich bin einfach noch nicht dazu gekommen, das ganze ausführlich zu testen. Es gibt gerade zu viele andere Baustellen - das Thema Timer wird demnächst weiter ausgearbeitet...
3. Geht es wenn Du ihn direkt auf die Schleife setzt und dann in der pfodApp->Commands->Track wählst? Falls es dann geht, klappt das "Einfahren" noch nicht. Das Einfahren ist ein Punkt der noch verbessert werden muss. Falls es grundsätzlich nicht abfahren kann (Track), müssen die Spulen ggf. besser angeordnet werden (Details siehe auf der Projektseite). Ggf. müssen die Track-Parameter (pfodApp->Settings->Perimeter PID) modifiziert, so dass es geht.
4. Ein Kurzschluß sollte eigentlich dazu führen, dass die Hauptsicherung durchbrennt - evtl. Sicherung zu groß gewählt? Die Sicherung sollte evtl. verkleinert werden. Ich baue noch einen Verpolungsschutz (und verkleinerte Sicherung) in das Schildbild ein...
Gruss,
Alexander
robostefan
Member
Ansprechverhalten der Ultraschallsensoren
Hallo,
ich hätte da mal einen Vorschlag und evtl. Verbesserung.
Es geht mir um die Erkennung der Ultraschallsensoren. Der Roby wird ja ab einer bestimmten Entfernung zu einem Objekt langsamer ehe er dann vor dem Hindernis stehen bleibt.
Das ist ja soweit super ABER, mir ist es jetzt schon öfter vorgekommen, dass irgend was kurz vor den Sensor gelangt (Blatt, Grasschnipsel usw.) und somit die Geschwindigkeit gedrosselt wird, da sich das Objekt jedoch nicht mehr in Reichweite befindet, fährt er bis zum Time-out langsam weiter.
Könnte man da nicht eine gewisse Zeit vorgeben, wenn nach Erkennung eines Hindernisses nix mehr vor dem Sensor ist, dass der Roby wieder mit normale Geschwindigkeit fährt?
Das fände ich super, anderen geht es sicher auch so.
Danke!
LG Stefan
Hallo,
ich hätte da mal einen Vorschlag und evtl. Verbesserung.
Es geht mir um die Erkennung der Ultraschallsensoren. Der Roby wird ja ab einer bestimmten Entfernung zu einem Objekt langsamer ehe er dann vor dem Hindernis stehen bleibt.
Das ist ja soweit super ABER, mir ist es jetzt schon öfter vorgekommen, dass irgend was kurz vor den Sensor gelangt (Blatt, Grasschnipsel usw.) und somit die Geschwindigkeit gedrosselt wird, da sich das Objekt jedoch nicht mehr in Reichweite befindet, fährt er bis zum Time-out langsam weiter.
Könnte man da nicht eine gewisse Zeit vorgeben, wenn nach Erkennung eines Hindernisses nix mehr vor dem Sensor ist, dass der Roby wieder mit normale Geschwindigkeit fährt?
Das fände ich super, anderen geht es sicher auch so.
Danke!
LG Stefan
kurzschuss
Administrator
Möchte noch mal nachfragen ob es möglich ist in einer der nächsten Softwareversionen ein Absturzzensor z.B per Ultraschall zu intrigieren der den Abstand zur Oberfläche misst. Sinn ist das er vor eine Kante oder Treppe stoppt bzw bei einer Pflanzeninsel wo das Erdreich tiefer liegt anhält.
Gruß
Uwe
Gruß
Uwe