Hier werde ich bald dokumentieren wie ich meinen JYQD-Treiber mit Sunray ans Laufen gebracht habe ... (Zunächst nur Mähmotor)


1. Die Verdrahtung für JYQD ist wie folgt:
JYQD CON4 (Steuer-Pins):
JYQD 5V (OUT) verbinden mit JYQD CON5: 5V (OUT)
JYQD EL (IN) verbinden mit Brushless Adapter En (OUT)
JYQD Signal (OUT) verbinden mit Brushless Adapter Odom. (IN)
JYQD Z/F (IN) verbinden mit Brushless Adapter Dir (OUT)
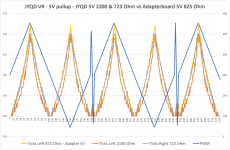
JYQD VR (IN) verbinden mit Brushless Adapter PWM (OUT)
JYQD GND verbinden mit Brushless Adapter GND
JYQD CON5 (Hall-Sensorik):
JYQD 5V (OUT) verbinden mit Motor Hall 5V (IN)
JYQD Ha (IN) verbinden mit Motor Hall U (OUT)
JYQD Hb (IN) verbinden mit Motor Hall V (OUT)
JYQD Hc (IN) verbinden mit Motor Hall W (OUT)
JYQD GND verbinden mit Motor Hall GND
JYQD OUT (Power-Pins):
JYQD P+ (IN) verbinden mit Ardumower-PCB motor power+ (OUT)
JYQD P- (IN) verbinden mit Ardumower-PCB motor power- (OUT)
JYQD MA (OUT) verbinden mit Motor Phase U (IN)
JYQD MB (OUT) verbinden mit Motor Phase V (IN)
JYQD MC (OUT) verbinden mit Motor Phase W (IN)
Schaltbilder und Tipps zum JYQD gibt es hier: http://grauonline.de/wordpress/?page_id=3122
2. JYQD-Treiber mit Spannung versorgen: es ist empfehlenswert für den ersten Test ein Labornetzteil mit Strombegrenzung (z.B. 1A) zu verwenden (damit der JYQD-Treiber nicht beschädigt wird beim Testen), hierfür JYQD P+ vom Ardumower-PCB trennen und anstelle das Netzteil an P+ und P- anschliessen (gemeinsame Masse über P- kann bestehen bleiben).
3. An "An Ha, Hb, Hc" messen, ob beim manuellen Drehen des Motors die Hall-Ausgänge von 5V auf 0V gehen. Falls dies beim betroffenen Motor nicht passiert müssen ggf. bereits vorhandene Hall-Pullups auf dem JYQD-Treiber entfernt werden (siehe obigen Link zum Schaltbild)
4. Aktuelle Sunray-Firmware (Master) verwenden (https://github.com/Ardumower/Sunray) und in config.h den JYQD-Treiber für den Mähmotor aktivieren:

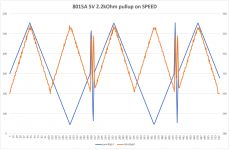
5. In der App Mähmotor mit "MOW IS ON" aktivieren und mit Oszilloskop (oder zur Not Voltmeter) messen ob ENABLE und PWM über die App geschaltet werden können (ENABLE muss dabei auf 5V gehen). Falls dies nicht gelingt fehlen vermutl. die Pullups für ENABLE und PWM am Brushless-Adapter (siehe auch: https://wiki.ardumower.de/index.php?title=Brushless_Adapter). Ich habe sie bei mir am JYQD-Treiber angelötet:
1K zwischen JYQD EL und JYQD 5V
1K zwischen JYQD PWM und JYQD 5V
6. Falls der Motor Geräusche macht aber nicht anläuft, ggf. Motor Phase (U, V, W)-Paare tauschen.
Leider sind mir beim Testen die JYQD-Mosfets kaputt gegangen (hatte zunächst ohne Labornetzteil getestet) und ich muss diese zunächst erneuern (NCE6990 gegen BUZ11A oder IRF9540N tauschen)... to be continued...
1. Die Verdrahtung für JYQD ist wie folgt:
JYQD CON4 (Steuer-Pins):
JYQD 5V (OUT) verbinden mit JYQD CON5: 5V (OUT)
JYQD EL (IN) verbinden mit Brushless Adapter En (OUT)
JYQD Signal (OUT) verbinden mit Brushless Adapter Odom. (IN)
JYQD Z/F (IN) verbinden mit Brushless Adapter Dir (OUT)
JYQD VR (IN) verbinden mit Brushless Adapter PWM (OUT)
JYQD GND verbinden mit Brushless Adapter GND
JYQD CON5 (Hall-Sensorik):
JYQD 5V (OUT) verbinden mit Motor Hall 5V (IN)
JYQD Ha (IN) verbinden mit Motor Hall U (OUT)
JYQD Hb (IN) verbinden mit Motor Hall V (OUT)
JYQD Hc (IN) verbinden mit Motor Hall W (OUT)
JYQD GND verbinden mit Motor Hall GND
JYQD OUT (Power-Pins):
JYQD P+ (IN) verbinden mit Ardumower-PCB motor power+ (OUT)
JYQD P- (IN) verbinden mit Ardumower-PCB motor power- (OUT)
JYQD MA (OUT) verbinden mit Motor Phase U (IN)
JYQD MB (OUT) verbinden mit Motor Phase V (IN)
JYQD MC (OUT) verbinden mit Motor Phase W (IN)
Schaltbilder und Tipps zum JYQD gibt es hier: http://grauonline.de/wordpress/?page_id=3122
2. JYQD-Treiber mit Spannung versorgen: es ist empfehlenswert für den ersten Test ein Labornetzteil mit Strombegrenzung (z.B. 1A) zu verwenden (damit der JYQD-Treiber nicht beschädigt wird beim Testen), hierfür JYQD P+ vom Ardumower-PCB trennen und anstelle das Netzteil an P+ und P- anschliessen (gemeinsame Masse über P- kann bestehen bleiben).
3. An "An Ha, Hb, Hc" messen, ob beim manuellen Drehen des Motors die Hall-Ausgänge von 5V auf 0V gehen. Falls dies beim betroffenen Motor nicht passiert müssen ggf. bereits vorhandene Hall-Pullups auf dem JYQD-Treiber entfernt werden (siehe obigen Link zum Schaltbild)
4. Aktuelle Sunray-Firmware (Master) verwenden (https://github.com/Ardumower/Sunray) und in config.h den JYQD-Treiber für den Mähmotor aktivieren:
5. In der App Mähmotor mit "MOW IS ON" aktivieren und mit Oszilloskop (oder zur Not Voltmeter) messen ob ENABLE und PWM über die App geschaltet werden können (ENABLE muss dabei auf 5V gehen). Falls dies nicht gelingt fehlen vermutl. die Pullups für ENABLE und PWM am Brushless-Adapter (siehe auch: https://wiki.ardumower.de/index.php?title=Brushless_Adapter). Ich habe sie bei mir am JYQD-Treiber angelötet:
1K zwischen JYQD EL und JYQD 5V
1K zwischen JYQD PWM und JYQD 5V
6. Falls der Motor Geräusche macht aber nicht anläuft, ggf. Motor Phase (U, V, W)-Paare tauschen.
Leider sind mir beim Testen die JYQD-Mosfets kaputt gegangen (hatte zunächst ohne Labornetzteil getestet) und ich muss diese zunächst erneuern (NCE6990 gegen BUZ11A oder IRF9540N tauschen)... to be continued...
Zuletzt bearbeitet:
")