Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Jürgen's Bumper-Duino Board
- Ersteller markus-lbon-facebook
- Erstellt am
elektronikjogi
Moderator
Hallo an alle ARDUMOWER Fans,
Markus hat es ja hier schon angekündigt. Daher noch ein paar kurze Sätze zu dem Wozu und dem Warum.
Die BumperDuino dient in erster Linie als Ersatz für mechanische Bumper. Bei einer mechanischen Bumper-Lösung mit Tastern, ist der Aufwand nicht ganz unerheblich und auch nicht einfach zu bauen (wenn es dauerhaft und robust funktionieren soll). Ich habe hier im Forum schon zwei mechanische Lösungen gesehen die man durchaus professionell bezeichnen kann. Allerdings war das sicher ein gutes Stück harte Arbeit (Hut ab).
Die BumperDuino arbeitet nach dem Prinzip der Druckveränderung in einem geschlossenen System. Das bedeutet sobald der Druck im Schlauch im Verhältnis zum "Normaldruck" in einer bestimmten Zeit mit einem vorgegebenen Wert steigt wird ein Signal ausgegeben. Ihr lest es bestimmt schon raus, so einfach ist das Ganze auch nicht. Man könnte auch mechanische Druckschalter nehmen die es für die Industrie gibt, jedoch sind die Guten sehr teuer und die Günstigen (zumindest die die wir getestet haben) für unsere Zwecke ungeeignet.
Da wir aber einen Auffahrschutz brauchen, da der Ultraschall nicht zuverlässig genug ist, haben wir uns diese Lösung ausgedacht. Durch die Software wird dieser Sensor bequem und leicht anpassbar für die Wünsche des jeweiligen Anwenders. Da wie immer alles "OPEN" ist könnt ihr jeden Winkel der Hard und Software erkunden und auch anpassen.
Die beiden OC-Ausgänge der BumperDuino werden einfach mit der ArduMower-Main verbunden noch etwas Stromversorgung dazu und schon habt ihr eure Bumper-Lösung fertig. Ich poste euch hier ein paar Bilder wie ich das für den Anfang gelöst habe und würde mich freuen Lösungen von euch zu sehen.
Im ersten Bild seht ihr den Schlauch den ich verwendet habe. Ein Ende kommt auf den Sensor das andere Ende wird mit Heißkleber verschlossen. Die Länge ist dabei fast beliebig.
Hier könnt Ihr meine Lösung für die Befestigung des Schlauchs gut sehen. Wobei ich sagen muss heute würde ich das etwas besser lösen. Der T-Adapter in der Mitte ist etwas unpraktisch. Denn trifft er ein Hindernis genau in der Mitte würde er davon nichts merken. Gott sei dank kommt das bei mir in der Praxis fast gar nicht vor.

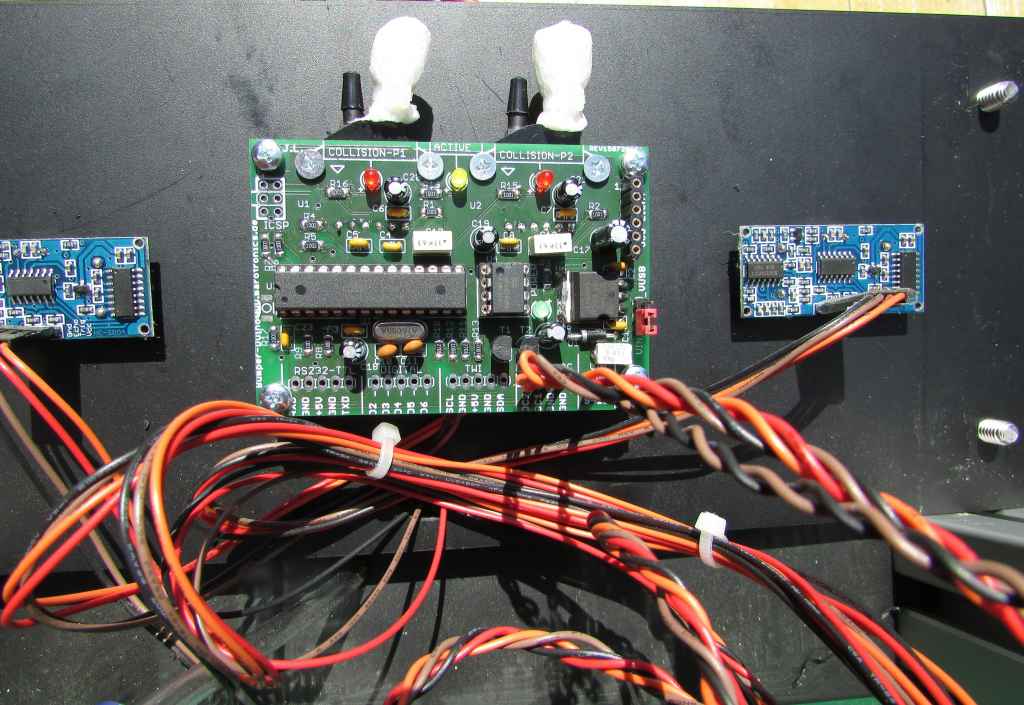
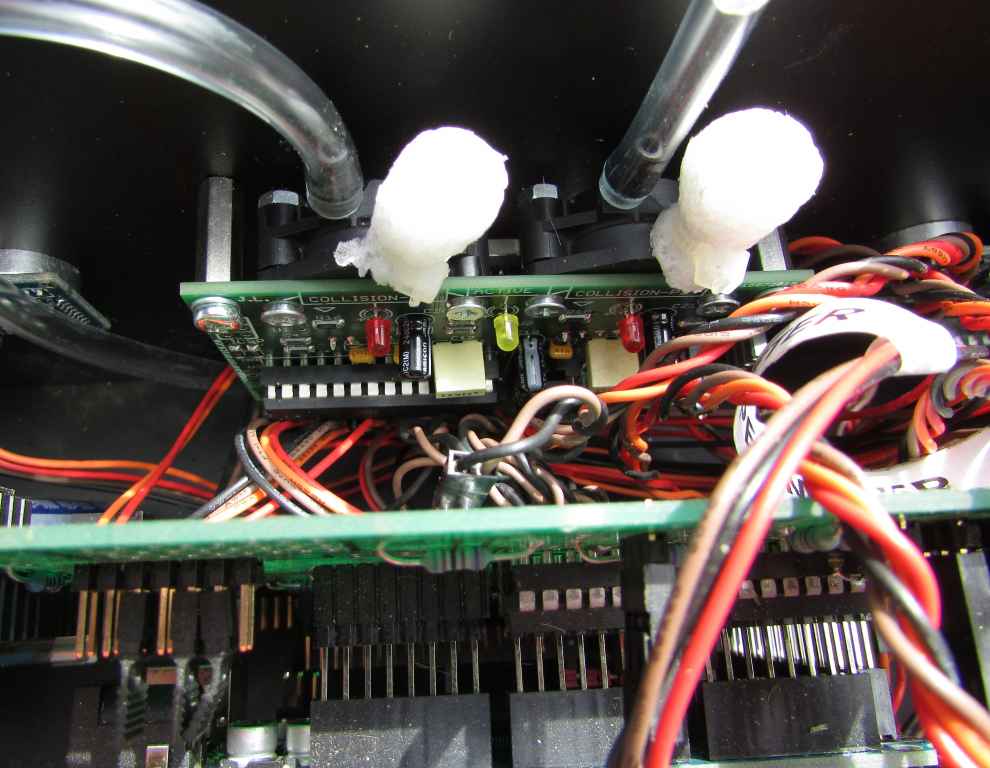
Mit den folgenden Bildern zeige ich euch wie ich die BumperDuino in den Mower eingebaut habe. Da jetzt Winterzeit ist habt ihr sicher mehr Zeit als ich in der Hauptsaison. :blink:
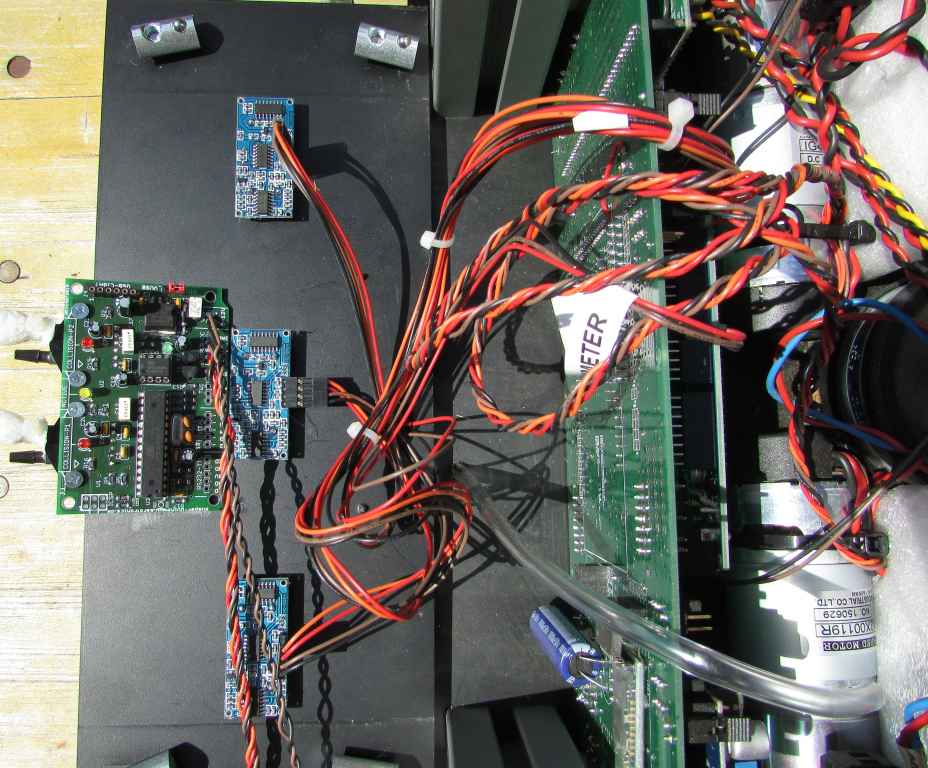
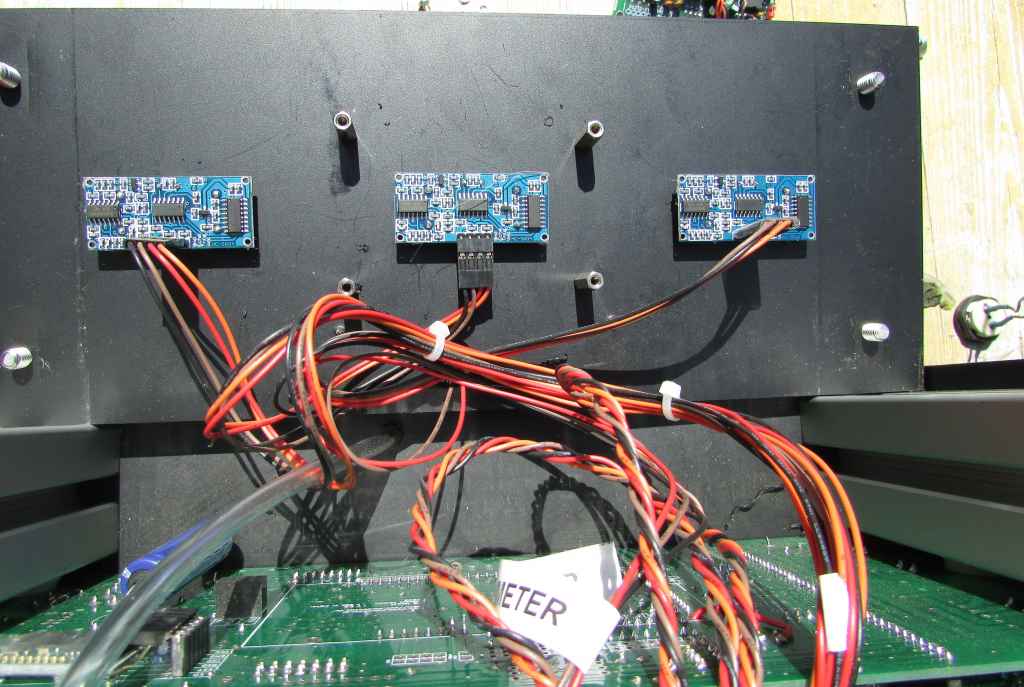
Auf dem Bild unten kann man schön die Schaumstoffteile sehen die ich als Luftfilter für den Vakuum-Anschluss des Drucksensors verwendet habe.
Auch meine Lösung für die Spannungsversorgung will ich euch nicht vorenthalten. Die BumperDuino sollte am besten mit der Versorgungsspannung des ATMEGA Boards versorgt werden also 9V-10V. Wobei ich immer die 9V empfehle da der Regler auf dem Arduino MEGA2560 Board schon wieder weniger verbraten muss. Die BumperDuino hat einen eigen Regler drauf der zusätzlich dafür sorgt, dass die Spannung so gut es geht sauber bleibt.
Zum Schluss noch zwei Bilder wie das ganze zusammengebaut aussieht. Wie ihr seht verwende ich im Augenblick nur einen Druckanschluss. Der zweite ist für hinten gedacht und wird auch in kürze in der Ardumower-Software so eingestellt sein.

Gruß
euer Ardumower-Team
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2370/BumperSchlauchBefestigung01.jpg/
Markus hat es ja hier schon angekündigt. Daher noch ein paar kurze Sätze zu dem Wozu und dem Warum.
Die BumperDuino dient in erster Linie als Ersatz für mechanische Bumper. Bei einer mechanischen Bumper-Lösung mit Tastern, ist der Aufwand nicht ganz unerheblich und auch nicht einfach zu bauen (wenn es dauerhaft und robust funktionieren soll). Ich habe hier im Forum schon zwei mechanische Lösungen gesehen die man durchaus professionell bezeichnen kann. Allerdings war das sicher ein gutes Stück harte Arbeit (Hut ab).
Die BumperDuino arbeitet nach dem Prinzip der Druckveränderung in einem geschlossenen System. Das bedeutet sobald der Druck im Schlauch im Verhältnis zum "Normaldruck" in einer bestimmten Zeit mit einem vorgegebenen Wert steigt wird ein Signal ausgegeben. Ihr lest es bestimmt schon raus, so einfach ist das Ganze auch nicht. Man könnte auch mechanische Druckschalter nehmen die es für die Industrie gibt, jedoch sind die Guten sehr teuer und die Günstigen (zumindest die die wir getestet haben) für unsere Zwecke ungeeignet.
Da wir aber einen Auffahrschutz brauchen, da der Ultraschall nicht zuverlässig genug ist, haben wir uns diese Lösung ausgedacht. Durch die Software wird dieser Sensor bequem und leicht anpassbar für die Wünsche des jeweiligen Anwenders. Da wie immer alles "OPEN" ist könnt ihr jeden Winkel der Hard und Software erkunden und auch anpassen.
Die beiden OC-Ausgänge der BumperDuino werden einfach mit der ArduMower-Main verbunden noch etwas Stromversorgung dazu und schon habt ihr eure Bumper-Lösung fertig. Ich poste euch hier ein paar Bilder wie ich das für den Anfang gelöst habe und würde mich freuen Lösungen von euch zu sehen.
Im ersten Bild seht ihr den Schlauch den ich verwendet habe. Ein Ende kommt auf den Sensor das andere Ende wird mit Heißkleber verschlossen. Die Länge ist dabei fast beliebig.
Hier könnt Ihr meine Lösung für die Befestigung des Schlauchs gut sehen. Wobei ich sagen muss heute würde ich das etwas besser lösen. Der T-Adapter in der Mitte ist etwas unpraktisch. Denn trifft er ein Hindernis genau in der Mitte würde er davon nichts merken. Gott sei dank kommt das bei mir in der Praxis fast gar nicht vor.
Mit den folgenden Bildern zeige ich euch wie ich die BumperDuino in den Mower eingebaut habe. Da jetzt Winterzeit ist habt ihr sicher mehr Zeit als ich in der Hauptsaison. :blink:
Auf dem Bild unten kann man schön die Schaumstoffteile sehen die ich als Luftfilter für den Vakuum-Anschluss des Drucksensors verwendet habe.
Auch meine Lösung für die Spannungsversorgung will ich euch nicht vorenthalten. Die BumperDuino sollte am besten mit der Versorgungsspannung des ATMEGA Boards versorgt werden also 9V-10V. Wobei ich immer die 9V empfehle da der Regler auf dem Arduino MEGA2560 Board schon wieder weniger verbraten muss. Die BumperDuino hat einen eigen Regler drauf der zusätzlich dafür sorgt, dass die Spannung so gut es geht sauber bleibt.
Zum Schluss noch zwei Bilder wie das ganze zusammengebaut aussieht. Wie ihr seht verwende ich im Augenblick nur einen Druckanschluss. Der zweite ist für hinten gedacht und wird auch in kürze in der Ardumower-Software so eingestellt sein.
Gruß
euer Ardumower-Team
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2370/BumperSchlauchBefestigung01.jpg/
Zuletzt bearbeitet von einem Moderator:
markus-lbon-facebook
New member
Ist in Arbeit. Derzeit lege ich 2 x 50cm bei.Marco2 schrieb:Bei dem Angebot im Shop sind da keine Schleuche und T-Stück mit dabei?
Zuletzt bearbeitet von einem Moderator:
Jürgen Lange schrieb:Hallo an alle ARDUMOWER Fans,
Geniale Idee!
In welchem Fertigungsverfahren wird der Bumper bisher hergestellt?
Wäre es denkbar, eine Halbschale in dem Bumper selbst für den Schlauch vorzusehen?
Der Schlauch wäre so evtl. per 2-K Kleber darin zu befestigen, sodass die Kabelbinder größtenteils entfallen könnten.
Ggf. könnte man hier sogar das T-Stück darin versenken.
Grüße, Stephan
[EDIT]
Was mir eben noch eingefallen ist... Wie verhalten sich die Schläuche unter UV-Licht? Härten sie aus?
Zuletzt bearbeitet von einem Moderator:
elektronikjogi
Moderator
Hallo Stephan,
zu Deiner Frage wegen den Schläuchen und UV-Licht. Die Schläuche die ich verwendet habe, waren den ganzen Sommer über im Einsatz und zeigen keine Verschleißerscheinungen oder eine Beeinträchtigung durch UV. Ich habe Luftschläuche für Aquarien verwendet.
Zu Deiner ersten Frage:
Ja die Idee mit der Halbschale ist gut an so etwas arbeite ich auch im Moment allerdings mit dem Ziel den T-Adapter nicht verwenden zu müssen. Die Lösung mit dem 2-K-Kleber habe ich schon im kleinen probiert und als nicht haltbar erkannt.
Aber keine Sorge ich meine ich habe eine gute Lösung gefunden. Man nehme einen 3-D Drucker und drucke mit PLA Befestigungsösen. Wenn man diese in Azeton einlegt und etwas ziehen lässt werden diese ähnlich flexibel wie der Schlauch selbst und lassen sich mit Schrauben gut befestigen. Im Kleinen geht das ganz gut im Großen bin ich leider noch nicht soweit. Der Bumper selbst ist Bestandteil des Gehäuses aus dem Shop.
Hier bin ich natürlich für jeden dankbar der das im 3D Zeichnet und als STL-Datei bereitstellt")
Ziel ist es auch die Kabelbinder völlig zu ersetzen.
Gruß
Jürgen
zu Deiner Frage wegen den Schläuchen und UV-Licht. Die Schläuche die ich verwendet habe, waren den ganzen Sommer über im Einsatz und zeigen keine Verschleißerscheinungen oder eine Beeinträchtigung durch UV. Ich habe Luftschläuche für Aquarien verwendet.
Zu Deiner ersten Frage:
Ja die Idee mit der Halbschale ist gut an so etwas arbeite ich auch im Moment allerdings mit dem Ziel den T-Adapter nicht verwenden zu müssen. Die Lösung mit dem 2-K-Kleber habe ich schon im kleinen probiert und als nicht haltbar erkannt.
Aber keine Sorge ich meine ich habe eine gute Lösung gefunden. Man nehme einen 3-D Drucker und drucke mit PLA Befestigungsösen. Wenn man diese in Azeton einlegt und etwas ziehen lässt werden diese ähnlich flexibel wie der Schlauch selbst und lassen sich mit Schrauben gut befestigen. Im Kleinen geht das ganz gut im Großen bin ich leider noch nicht soweit. Der Bumper selbst ist Bestandteil des Gehäuses aus dem Shop.
Hier bin ich natürlich für jeden dankbar der das im 3D Zeichnet und als STL-Datei bereitstellt
Ziel ist es auch die Kabelbinder völlig zu ersetzen.
Gruß
Jürgen
Hi Jürgen,
das ist bei entsprechender Schlauchverlegung ein super Rundumschutz!
Mit einem dickeren Schlauch hat man noch mehr Pufferzone zum Anhalten.
Zum steuern qualifizierter Ausweichmanöver bräuchte man allerdings eine Angabe die Richtung bzw. den Winkel der Kontaktstelle. Könnte man das Ganze noch kombinieren mit der Auswertung eines Beschleunigungssensors?
Möglicherweise liefert der aber auch nicht unbedingt genau das gewünschte Signal: bei Stop aus Geradeausfahrt vorwärts nach einem Kontakt unter 45 Grad vorn rechts dürfte die am Beschleunigungssensor gemessene Verzögerung durch das Eindrücken des Sensorschlauches deutlich weniger stark ausfallen als die Bremsung der Vorwärtsfahrt. Andererseits: liefert der Bumperduino ein Signal durch den Schlauch vorn, könnte man im gleichen Moment die Beschleunigungssensorik befragen, aus welcher Richtung der Kontsktstoß kam und dann in die andere Richtung steuern??? Viele Fragen und Möglichkeiten für eine weitere Reihe von Experimenten
Vielen Dank für Deine tolle Sensorlösung.
Peter
das ist bei entsprechender Schlauchverlegung ein super Rundumschutz!
Mit einem dickeren Schlauch hat man noch mehr Pufferzone zum Anhalten.
Zum steuern qualifizierter Ausweichmanöver bräuchte man allerdings eine Angabe die Richtung bzw. den Winkel der Kontaktstelle. Könnte man das Ganze noch kombinieren mit der Auswertung eines Beschleunigungssensors?
Möglicherweise liefert der aber auch nicht unbedingt genau das gewünschte Signal: bei Stop aus Geradeausfahrt vorwärts nach einem Kontakt unter 45 Grad vorn rechts dürfte die am Beschleunigungssensor gemessene Verzögerung durch das Eindrücken des Sensorschlauches deutlich weniger stark ausfallen als die Bremsung der Vorwärtsfahrt. Andererseits: liefert der Bumperduino ein Signal durch den Schlauch vorn, könnte man im gleichen Moment die Beschleunigungssensorik befragen, aus welcher Richtung der Kontsktstoß kam und dann in die andere Richtung steuern??? Viele Fragen und Möglichkeiten für eine weitere Reihe von Experimenten
Vielen Dank für Deine tolle Sensorlösung.
Peter
elektronikjogi
Moderator
Marco2 schrieb:Ich kann das in CAD zeichnen und die STL Datei online stellen. Ich brauche nur eine Zeichnung.
Hallo Marco,
hier mal meine Lösung für einen Schlauchhalter. Die Schlauch-Durchführung hat einen Durchmesser von 7mm. Das Befestigungsloch habe ich mit 3,3mm Durchmesser angenommen. Hier lassen sich sicher noch viele Verbesserungen einarbeiten.
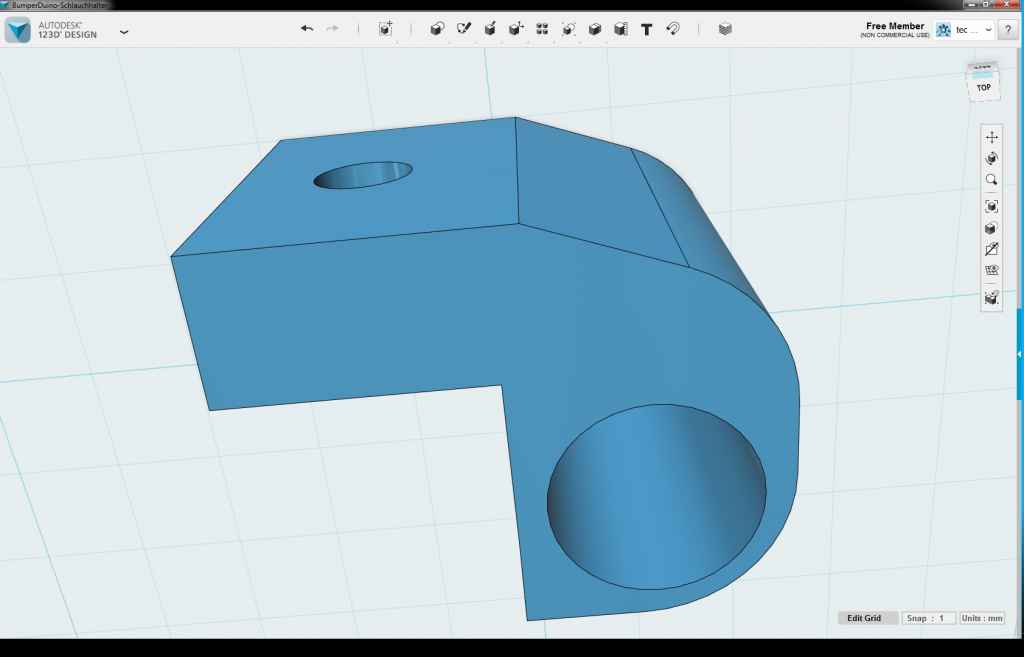
Gruß Jürgen
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2370/SchlauchhalterV01.jpg/
Zuletzt bearbeitet von einem Moderator:
elektronikjogi
Moderator
Peter Sorgatz schrieb:Hi Jürgen,
das ist bei entsprechender Schlauchverlegung ein super Rundumschutz!
Mit einem dickeren Schlauch hat man noch mehr Pufferzone zum Anhalten.
Zum steuern qualifizierter Ausweichmanöver bräuchte man allerdings eine Angabe die Richtung bzw. den Winkel der Kontaktstelle. Könnte man das Ganze noch kombinieren mit der Auswertung eines Beschleunigungssensors?
Möglicherweise liefert der aber auch nicht unbedingt genau das gewünschte Signal: bei Stop aus Geradeausfahrt vorwärts nach einem Kontakt unter 45 Grad vorn rechts dürfte die am Beschleunigungssensor gemessene Verzögerung durch das Eindrücken des Sensorschlauches deutlich weniger stark ausfallen als die Bremsung der Vorwärtsfahrt. Andererseits: liefert der Bumperduino ein Signal durch den Schlauch vorn, könnte man im gleichen Moment die Beschleunigungssensorik befragen, aus welcher Richtung der Kontsktstoß kam und dann in die andere Richtung steuern??? Viele Fragen und Möglichkeiten für eine weitere Reihe von Experimenten
Vielen Dank für Deine tolle Sensorlösung.
Peter
Hallo Peter,
Danke Dir. Mit einem dickeren Schlauch habe ich es auch versucht, allerdings keine vernünftigen Ergebnisse erziehlt, da der Schlauch nicht unter richtigem Druck steht, geht er nach einem Kontakt nicht immer in seine Ursprungsform zurück.
Was die Möglichkeiten der Lösung angeht sind diese natürlich unbegrenzt je mehr Sensordaten man dafür her nimmt. Die einfachste Lösung ist die, dass der Mower ja weiß wie er sich Bewegt und daraus sein Verhaltensmuster berechnet.
Gruß
Jürgen
Zuletzt bearbeitet von einem Moderator:
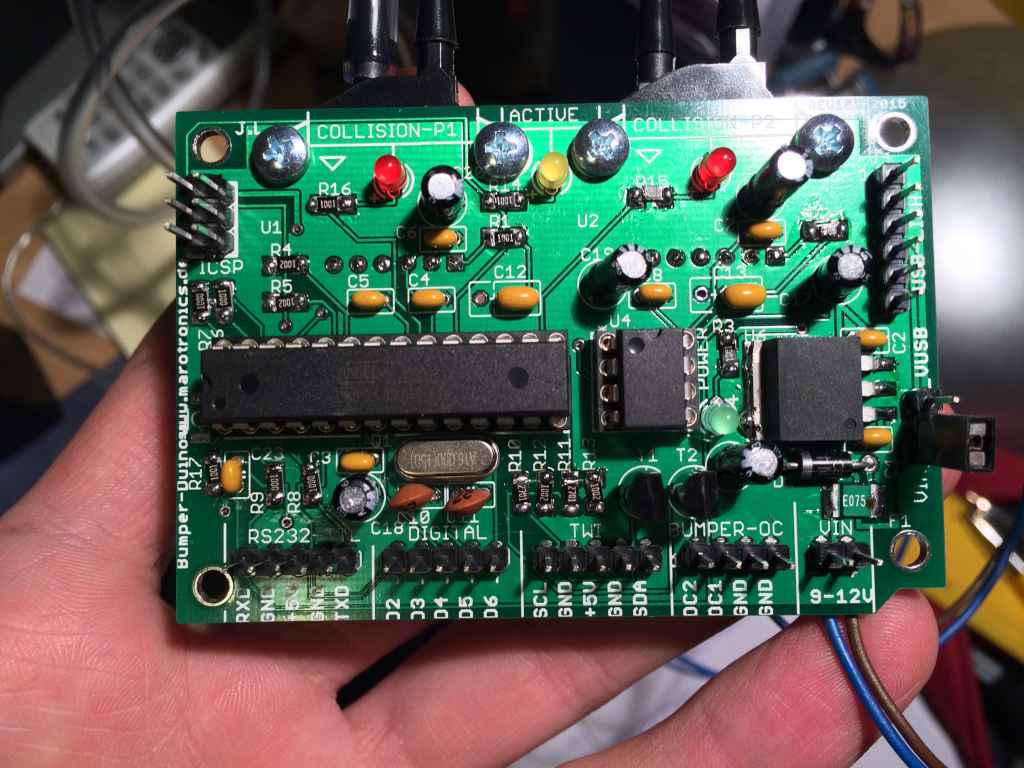
Mal ne Frage. Ich habe die Platine jetzt fertig zusammengelötet. Wenn ich 9V anschließe leuchtet die Grüne LED. Mehr passiert nicht er reagiert nicht auf druck oder sonstiges. Kann es sein das das Programm nicht auf dem Atmega ist? Und noch was das USB Light ist das ein FTDI Anschluss?
markus-lbon-facebook
New member
MHHHH bei der Anleitung kann man eigentlich nicht viel falsch machen.Marco2 schrieb:Mal ne Frage. Ich habe die Platine jetzt fertig zusammengelötet. Wenn ich 9V anschließe leuchtet die Grüne LED. Mehr passiert nicht er reagiert nicht auf druck oder sonstiges. Kann es sein das das Programm nicht auf dem Atmega ist? Und noch was das USB Light ist das ein FTDI Anschluss?
Wenn das Board in Bereitschaft ist und alles läuft, blinkt die Gelbe "Active" LED.
Ich habe gerade mal einen von Jürgen beschriebenen Chips genommen, lief auf Anhieb.
Stelle mal bitte ein Foto ein.
Zuletzt bearbeitet von einem Moderator:
{kind=link}
{kind=link}
{kind=link}
Zuletzt bearbeitet von einem Moderator:
markus-lbon-facebook
New member
Markus schrieb:
??
Zuletzt bearbeitet von einem Moderator:
markus-lbon-facebook
New member
Marco2 schrieb:Markus schrieb:
??
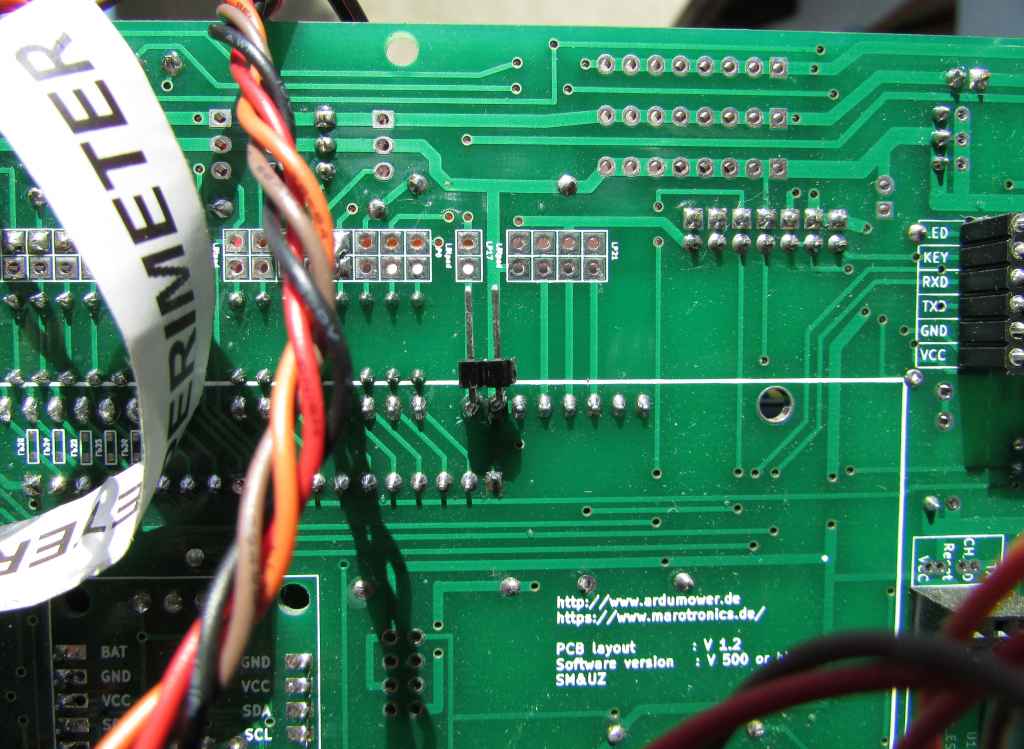
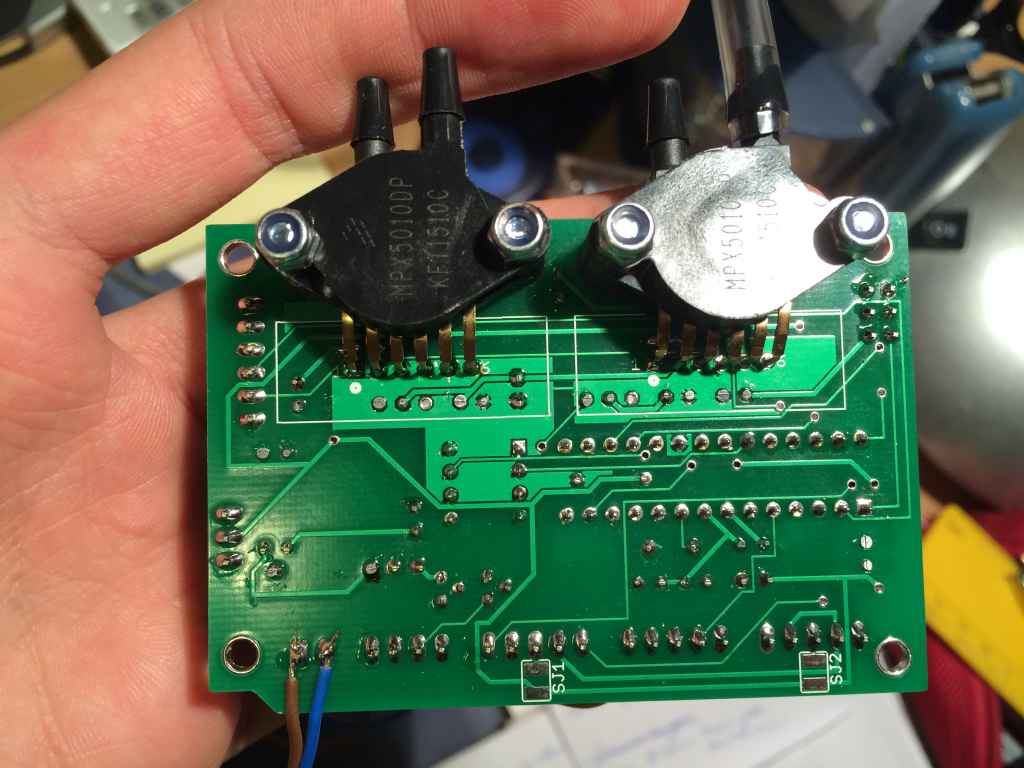
ich hätte besser in die Anleitung schauen sollen. Ich habe die beiden Längs eingelötet.
OK laufen tut das ganze bei mir dennoch.
Hätte sich wohl erst an anderer Stelle bemerkbar gemacht, ja ja sind's die Augen...
Also ich kann nichts bei Dir finden.
Wir können gerne den Atmega mal tauschen.
Zuletzt bearbeitet von einem Moderator:
elektronikjogi
Moderator
elektronikjogi
Moderator
Sehr schön das freut mich
Gruß
Jürgen
Gruß
Jürgen