So jetzt wird es wieder ernsthaft nach Sound etc.
Ziel ist es die BumperDuino zu einem der zusätzlichen Sicherungen für den Mower zu machen ohne das sichhergestellt werden muss das der Main oder Master Prozess auch wirklich richtig läuft (an dem bastelt ja jeder von uns/euch rum)
")
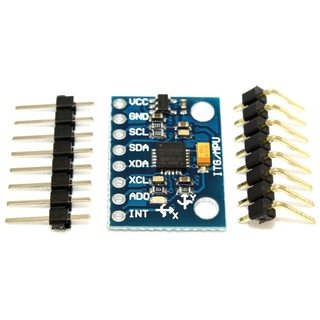
Der nächste Schritt in der Entwicklung der BumperDuino wird das Einfügen des MPU6050 mit Accelerometer und Gyroscope sein. Wir werden diesen Sensor quasi als Aufprall-Sensor wie er ähnlich auch bei Airbags genutzt wird verwenden.
Damit haben wir dann nach meinem Wissen, einen der sichersten aktiven Bumper den es für diesen Bereich gibt und das noch nebenbei ohne komplizierten mechanischen Aufbau. Auch in der Handhabung ist dieser aktive Bumper-Sensor einfach. Die Master CPU muss sich um nichts kümmern. Was nicht bedeutet, dass diese nicht auch eine IMU haben darf/soll. Nur hängt die Main CPU oder ähnliches, ist die BumperDuino immer noch als Instanz aktiv, egal was die Steuerung macht oder auch nicht.
Aus dieser Überlegung ergibt sich auch die logische Konsequenz, dass zusätzlich noch ein Port als Schaltausgang spendiert wird, der dann über ein z.B. Relais den gefährlichen Mähmotor ausschaltet, sobald der Mower über einen gewissen Punkt angehoben wird.
Damit hätten wir auch für diesen Fall einen unabhängigen Schutz. Wenn man die Verletzungen kennt die so ein Messer anrichten kann denke ich sicher nicht schlecht und auch nicht übertrieben.
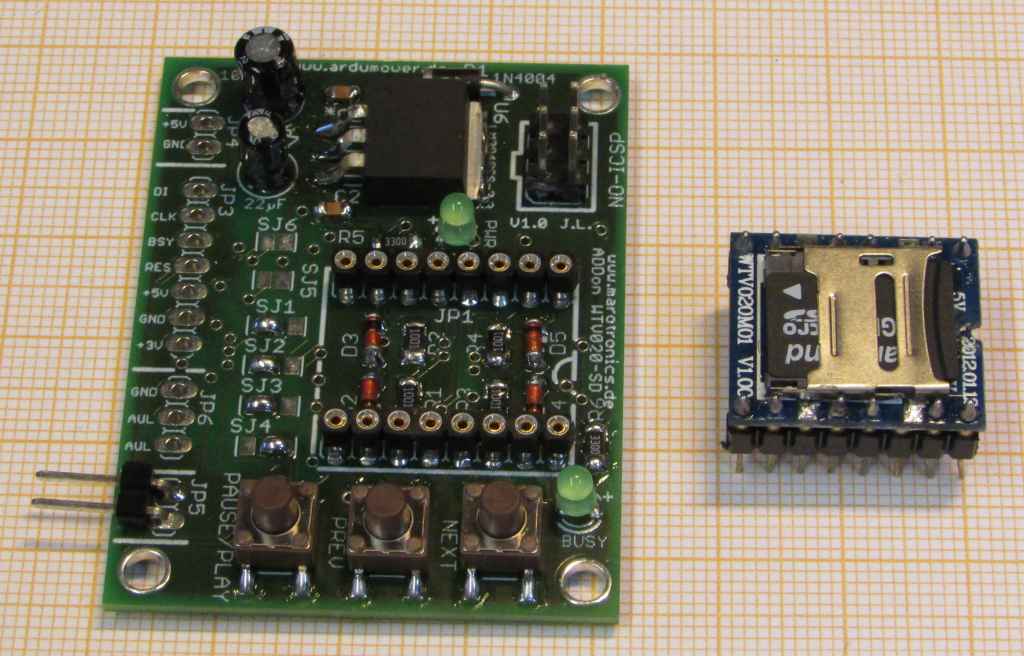
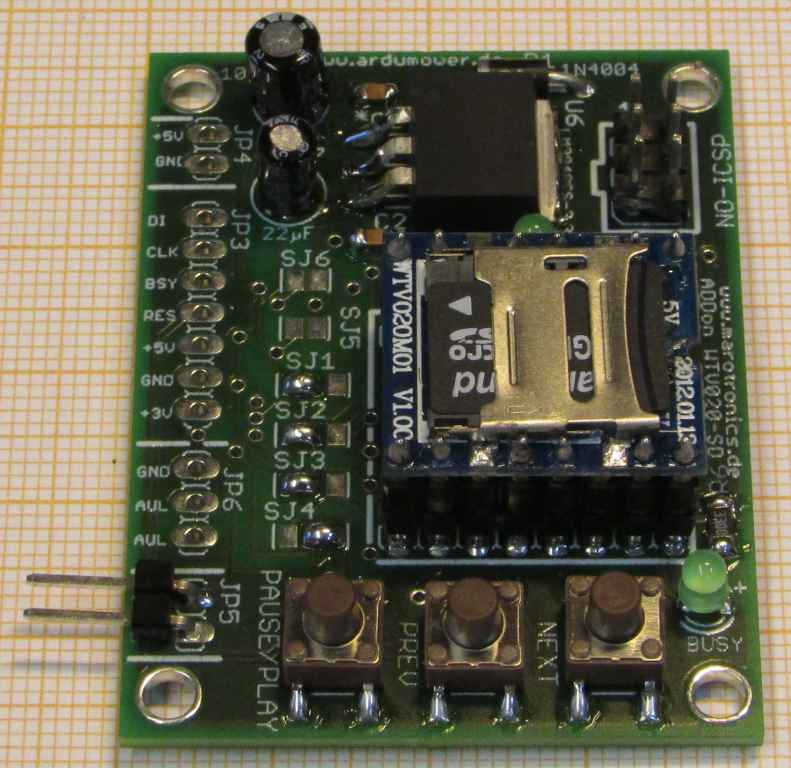
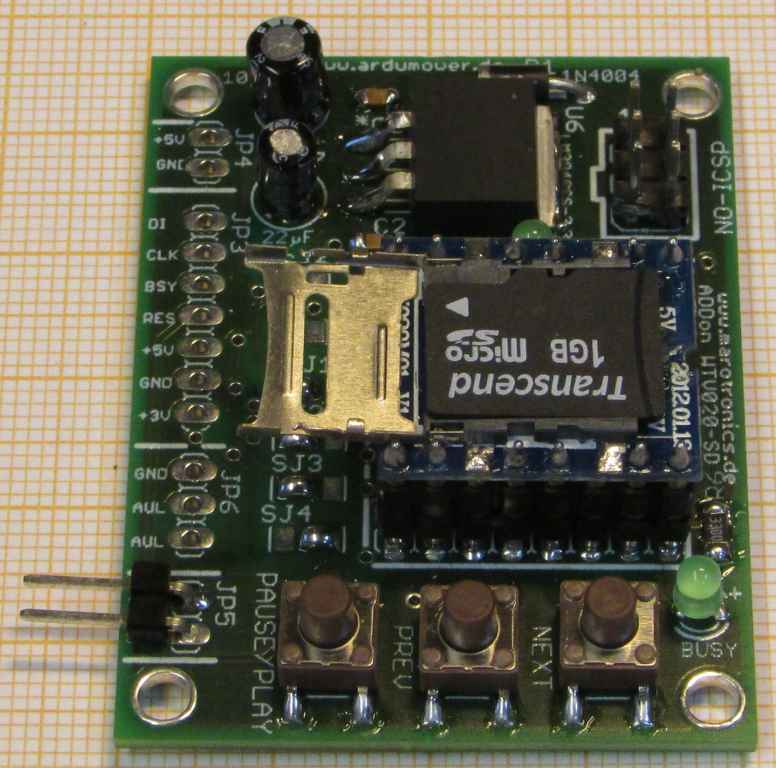
Hier ein Bild vom geplanten Sensor
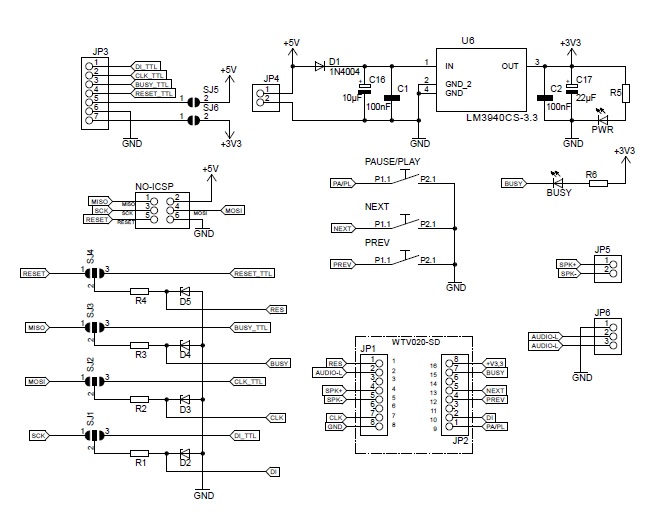
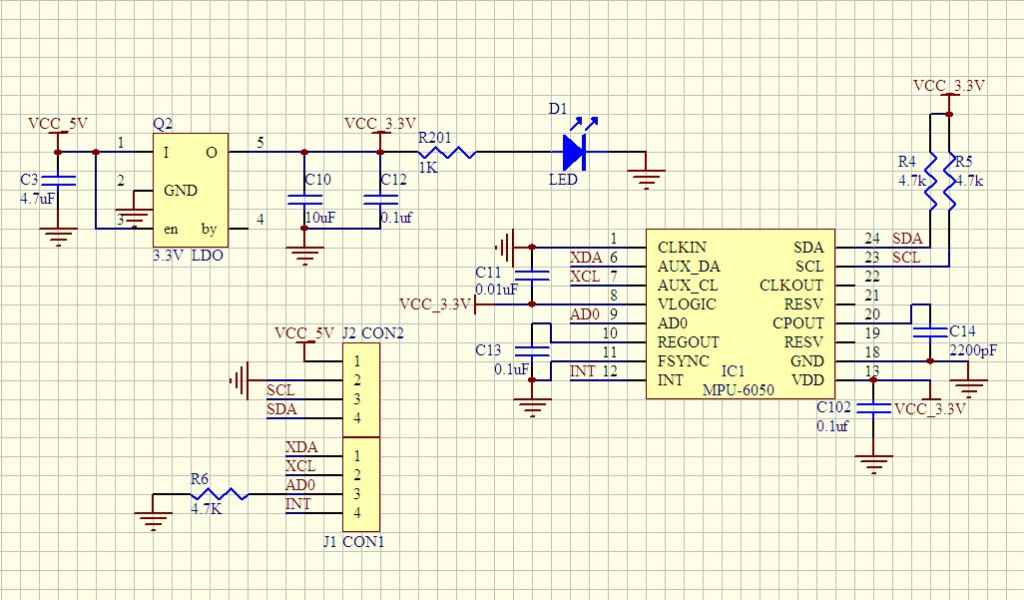
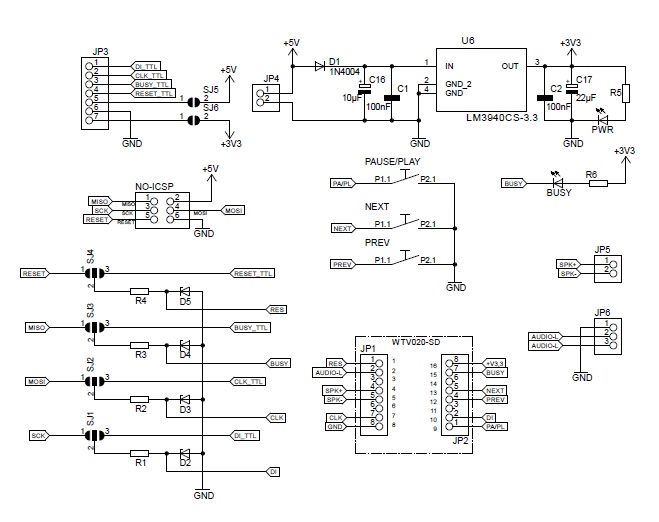
Der Schaltplan vom Sensor
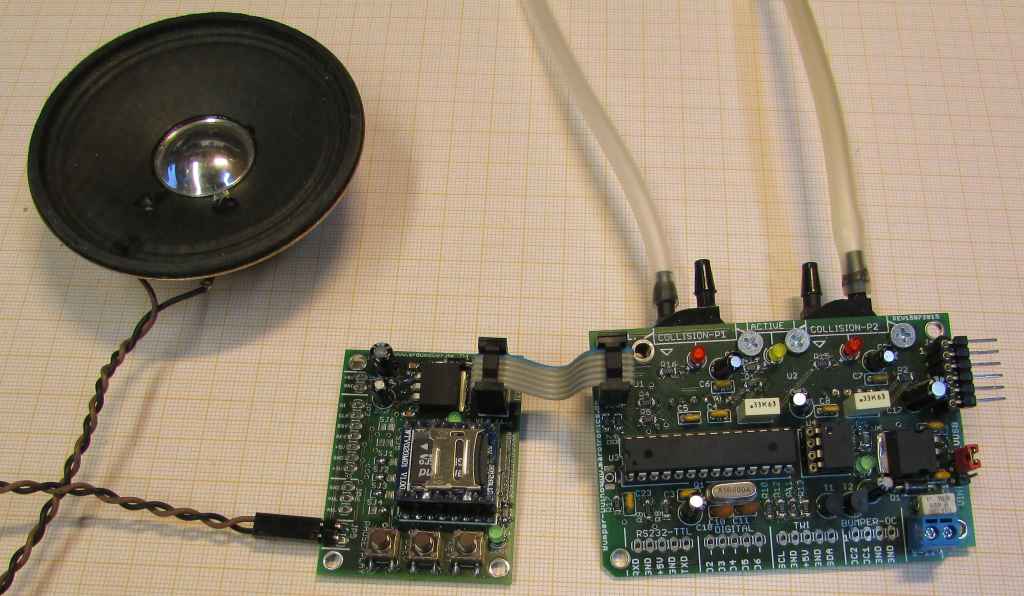
Natürlich kann man dann (wenn man es will), auch eine Sprachausgabe als zusätzliche Warnung ausgeben.
Es geht immer weiter.......
Attachment:
https://forum.ardumower.de/data/media/kunena/attachments/2370/mpu-6050-arduino.jpg/







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}