Guten Abend,
habe mich nach einem Jahr Ruhe, auf Grund persönlicher Probleme, wieder mit dem Rover beschäftigt und komme nicht weiter. Bastle schon zwei Tage an dem Problem herum, die Software auf den
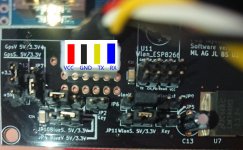
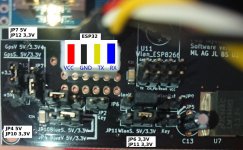
ESP32 zu spielen. Keine Chance. Bitte um Eure Hilfe.
Bei allen Versionen bricht die Installation in dieser Zeile ab:
C:\Users\st-me\OneDrive\Dokumente\
Arduino\libraries\ESP32_HTTPS_Server\src/HTTPConnection.hpp:9:26:
fatal error: hwcrypto/sha.h: No such file or directory
compilation terminated.
Was kann ich machen um die nach meiner Ansicht fehlende Datei einzubinden? Oder was ist die Ursache für diese Fehlermeldung?
Ich habe die neueste Sunray Version 1.0.230 installiert.
Danke für Eure Bemühungen.
Mit freundlichen Grüßen aus Chemnitz
Stefan Meyer
Anlage:
Arduino: 1.8.19 (Windows Store 1.8.57.0) (Windows 10), Board: "
ESP32 Dev Module, Disabled, Minimal SPIFFS (1.9MB APP with OTA/190KB SPIFFS), 240MHz (WiFi/BT), QIO, 80MHz, 4MB (32Mb), 921600, None"
Alternatives for hwcrypto/sha.h: []
ResolveLibrary(hwcrypto/sha.h)
-> candidates: []
In file included from C:\Users\st-me\OneDrive\Dokumente\
Arduino\libraries\ESP32_HTTPS_Server\src/HTTPServer.hpp:23:0,
Mehrere Bibliotheken wurden für "WiFi.h" gefunden
Benutzt: C:\Users\st-me\OneDrive\Dokumente\ArduinoData\packages\
esp32\hardware\
esp32\2.0.1\libraries\WiFi
from H:\Sunray\Sunray-1.0.230\esp32_ble\esp32_ble.ino:46:
Nicht benutzt: C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.57.0_x86__mdqgnx93n4wtt\libraries\WiFi
C:\Users\st-me\OneDrive\Dokumente\
Arduino\libraries\ESP32_HTTPS_Server\src/HTTPConnection.hpp:9:26: fatal error: hwcrypto/sha.h: No such file or directory
compilation terminated.
Bibliothek WiFi in Version 2.0.0 im Ordner: C:\Users\st-me\OneDrive\Dokumente\ArduinoData\packages\
esp32\hardware\
esp32\2.0.1\libraries\WiFi wird verwendet
Bibliothek ESP32_HTTPS_Server in Version 1.0.0 im Ordner: C:\Users\st-me\OneDrive\Dokumente\
Arduino\libraries\ESP32_HTTPS_Server wird verwendet
exit status 1
Fehler beim Kompilieren für das Board
ESP32 Dev Module.
")