Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Anleitung für das Ardumower Komplettset erstellen
- Ersteller markus
- Erstellt am
OK, habe die Verkabelung geändert, trotzdem lädt der Mäher auch in eingeschaltetem Zustand nicht. Das PCB piepst nur ständig mit kurzem Ton in langem Intervall, liegt vielleicht daran, dass das HC-05-Modul noch fehlt. Es ist jedenfalls jetzt erstmal die Azurit-Firmware auf dem Arduino installiert.
So, inzwischen konnte ich weitere Probleme beheben, angefangen damit, dass unter dem Arduino-Klon ein Jumper gesetzt werden muss (was zwar auch irgendwo in der Anleitung steht, aber nicht klar war), über die Einstellung der Odometrie, die hinten und vorne nicht passt und empierisch ermittelt worden ist, bis zum Anschluss der Power-LED, die keinen dedizierten Anschluss auf dem Mainboard besitzt. Das Laden ging dann auch irgendwann wie von Geisterhand von selbst, jedenfalls wäre mir nicht bewusst, dass ich da irgendeine Änderung vorgenommen hätte. Der neue HC-05 kommuniziert jetzt auch, allerdings nur wenn die IMU angeschlossen ist (vermutlich auch wieder irgend so ein Firmware-Fehler), danach kann man aber die IMU in der ArduRemote wieder deaktivieren und dann geht es endlich so wie gewollt. Außerdem fehlt für den Anschluss der IMU im Komplettpaket ein 5-poliger XH-Stecker sowie die IMU selbst. Deswegen habe ich einen 4-poligen dafür geopfert, der jetzt natürlich wieder an anderer Stelle fehlt. Weiterhin habe ich deshalb mal ein ganzes Paket dieser Stecker in verschiedenen Größen bestellt, damit auch der Rest der Sensoren nun endlich angeschlossen werden kann.
Nichtsdestotrotz habe ich den Mäher heute mal ein paar Runden im Garten drehen lassen im manuellen Modus und eigentlich bin ich ziemlich begeistert davon wie der Mäher so arbeitet. Es zeigt auf jeden Fall, dass der enormes Potenzial hat. Dafür muss nun noch der Rest der Sensorik angebaut werden und dann muss das Gerät noch irgendwie an die Landschaft angelernt werden. Aber ich bin zuversichtlich, dass auch das mit etwas Fleiß zu bewältigen ist, ist denke die schwerste Arbeit liegt da hinter mir") .
.
An dieser Stelle möchte ich mich nochmal herzlich für die Unterstützung hier bedanken! Weitere Fragen werden sicher noch folgen...
Nichtsdestotrotz habe ich den Mäher heute mal ein paar Runden im Garten drehen lassen im manuellen Modus und eigentlich bin ich ziemlich begeistert davon wie der Mäher so arbeitet. Es zeigt auf jeden Fall, dass der enormes Potenzial hat. Dafür muss nun noch der Rest der Sensorik angebaut werden und dann muss das Gerät noch irgendwie an die Landschaft angelernt werden. Aber ich bin zuversichtlich, dass auch das mit etwas Fleiß zu bewältigen ist, ist denke die schwerste Arbeit liegt da hinter mir
.An dieser Stelle möchte ich mich nochmal herzlich für die Unterstützung hier bedanken! Weitere Fragen werden sicher noch folgen...

you need the 3D-Part Adapter for the mowingmotor https://drive.google.com/file/d/1XZGXcEecR4rfOZbP5PuCNcZBMNptM3Xo/view?usp=sharing
see also the picture on the end of page https://www.marotronics.de/Ardumower-Rasenroboter-Set-Model-2021-auch-mit-GPS-RTK-Option
Thank you Algo! This makes things less obscure.you need the 3D-Part Adapter for the mowingmotor https://drive.google.com/file/d/1XZGXcEecR4rfOZbP5PuCNcZBMNptM3Xo/view?usp=sharing
see also the picture on the end of page https://www.marotronics.de/Ardumower-Rasenroboter-Set-Model-2021-auch-mit-GPS-RTK-Option
However in the manual Ardumower-Main 1.4 Aufbaubeschreibung Version: V1.4 r11 Pg53 there is still the reference for the 220uF capacitors. It should be 220nF...
Thanks for the pictures!Nun folgt der Deckel.
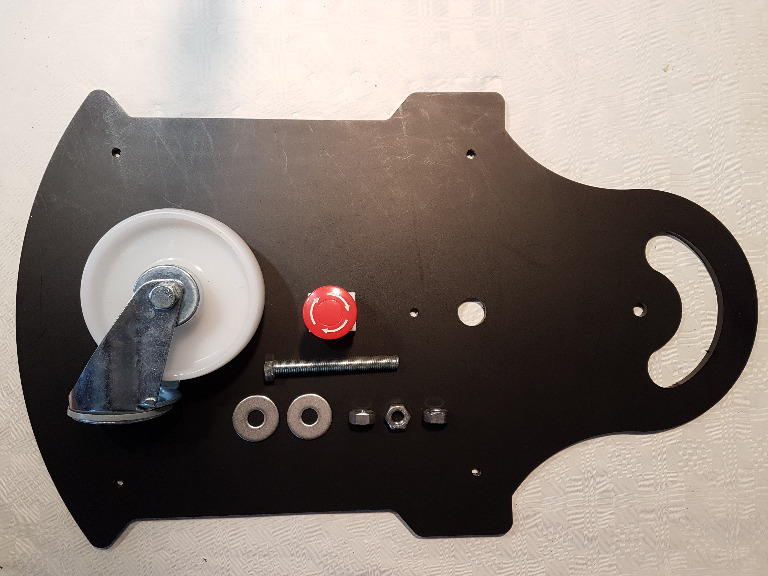
Als erstes drehen wir die lange Schraube ein. Für eine bessere Lastverteilung kommen von beiden Seiten Unterlegscheiben dazwischen.
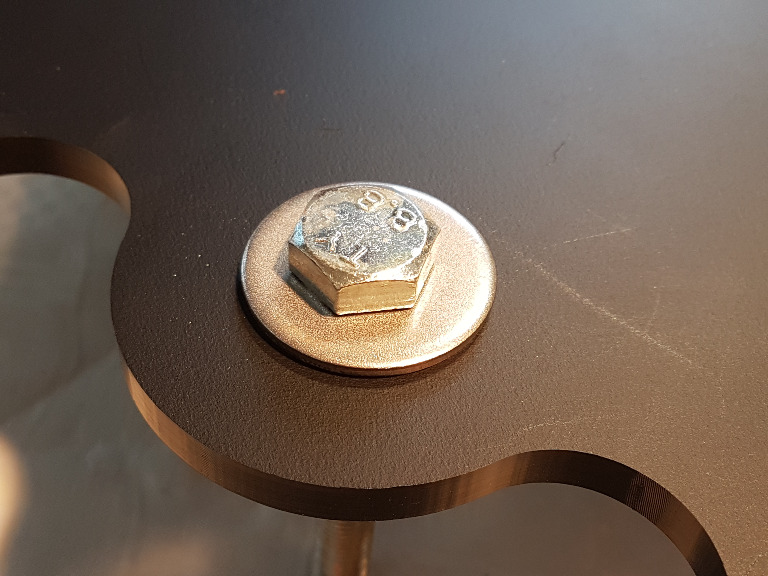

Mit zwei 19er Schlüsseln fest anziehen.
Dann erfolgt auch schon die Montage des Spornrads.


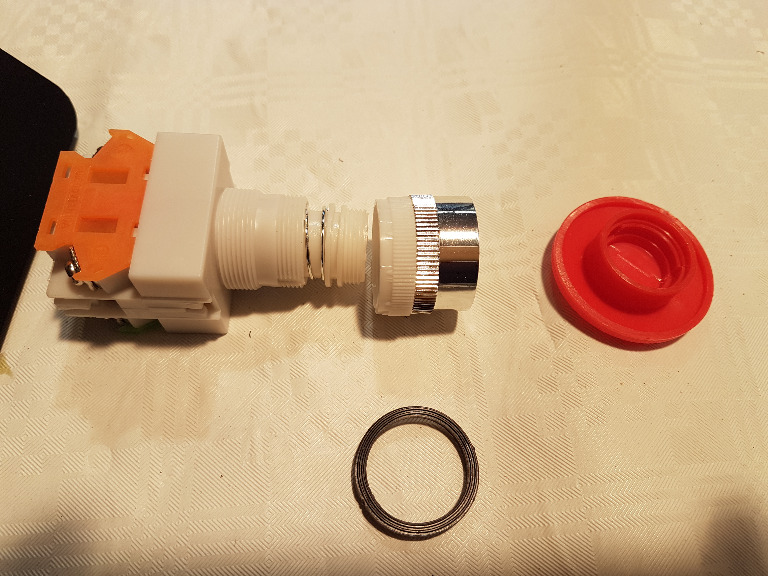
Zum Schluss wird der Not-Ausschalter eingebaut.
Es gibt zwei Varianten, einmal mit und einmal ohne Dichtung. Hier im Beispiel erfolgt die Montage ohne Dichtring.
Wenn Ihr den Dichtring verwenden wollt müsst ihr den weißen Ring kürzen. Ohne die Kürzung fast sonst das Gewinde nicht.


Attachment: https://forum.ardumower.de/data/media/kunena/attachments/191/20180202_122432.jpg/
{kind=link}
However for different reasons I doubt this mounting of the emergency stop is correct. The white ring should be on the inside. Is there a specific reason why it is on the outside?
Silberstreifen
Active member
Beim Aufbau meines Ardumowers habe ich jetzt das Problem, dass die PCB 1.4 zu hoch ist für das Gehäuse. Die Platine sieht auch anders aus, als auf Bildern der PDF-Anleitung. Ist das ein neues Design, oder muss da noch etwas gekürzt werden?
Habe im Forum dazu nichts gefunden. Bin ich der einzige mit dem Problem?
Wenn gekürzt werden muss, wo genau muss/darf da etwas weg? Ich will ja keine Leiterbahnen durchtrennen. Und mit welchem Werkzeug kann ich das machen?
Habe im Forum dazu nichts gefunden. Bin ich der einzige mit dem Problem?
Wenn gekürzt werden muss, wo genau muss/darf da etwas weg? Ich will ja keine Leiterbahnen durchtrennen. Und mit welchem Werkzeug kann ich das machen?
schau mal hier in den Thread, da ist das schon besprochen wordenBeim Aufbau meines Ardumowers habe ich jetzt das Problem, dass die PCB 1.4 zu hoch ist für das Gehäuse. Die Platine sieht auch anders aus, als auf Bildern der PDF-Anleitung. Ist das ein neues Design, oder muss da noch etwas gekürzt werden?
Habe im Forum dazu nichts gefunden. Bin ich der einzige mit dem Problem?
Wenn gekürzt werden muss, wo genau muss/darf da etwas weg? Ich will ja keine Leiterbahnen durchtrennen. Und mit welchem Werkzeug kann ich das machen?
Mainboard mit falschen Maßen
Hallo Zusammen, ich habe mir neulich ein neues Mainboard bestellt. Alles angelötet und wollte es jetzt einbauen zum testen. Dabei ist mir aufgefallen, dass die Platine oben und unten nicht bzw. falsch abgeschnitten ist. Jetzt passt die Platine nicht ganz in das Gehäuse. Der Deckel kann nicht...
forum.ardumower.de
Silberstreifen
Active member
Alles klar. Danke. Hatte ich nicht gefunden.