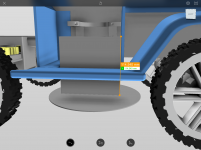
zum Bild,
das ist steiler als bei mir, aber wiederum weniger als beim Nachbarn (wo ich auch getestet habe). Der Mäher auf dem Bild ist schon sehr gut geeignet. 4wd, kurzer Radstand, der mangels Lenkachse auch erforderlich ist, Zackenrad. Was ich nicht beurteilen kann, ist die Möglichkeit in engeren Stellen zu manövrieren.
Meine Erfahrungen bei dieser Steigung: 4wd kein Problem. Wichtig sind aus eigener Erfahrung die Räder. Warum andere user mit dem Standard-Gummirad keine Probleme haben kann ich nicht nachvollziehen, ist wohl aber so. Hat allerdings auch mindestens 28cm Durchmesser (für meine Auslegung zu groß).
Beim 2wd habe ich Heckantrieb umgesetzt und 1-2kg Split auf die Hinterachse gelegt, damit die Räder nicht durchdrehen. 2wd mit Stützrad funktioniert aber bei dieser Steigung nicht, weil der Mäher die Spur nicht halten kann und immer den Berg runterfährt. Das macht er schon bei meiner Steigung.
Gruß Fürst Ruprecht











")