Do you know stearing robot vitirover ?
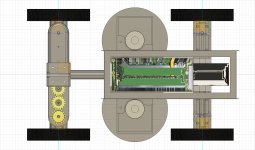
Are you sure that you need to use a servo for heading maybe simply replace it with a simple big ball bearing locate in the middle of chassis in the axis of mow motor.
After if you can control the 4 wheel speed individually by software you can have a very good 4WD.
but it's a lot of work in the software to manage the 4 wheels at exact speed according geometry of platform.
Are you sure that you need to use a servo for heading maybe simply replace it with a simple big ball bearing locate in the middle of chassis in the axis of mow motor.
After if you can control the 4 wheel speed individually by software you can have a very good 4WD.
but it's a lot of work in the software to manage the 4 wheels at exact speed according geometry of platform.


") . Wäre vielleicht noch denkbar, einen Längsausgleich wie ihn der Ambrogio 4 Elite hat, mit zu verbauen.
. Wäre vielleicht noch denkbar, einen Längsausgleich wie ihn der Ambrogio 4 Elite hat, mit zu verbauen.