elektronikjogi
Moderator
Hallo ArduMower-Freunde,
eine kurze Erklärung scheint hier zum Connect-Duino notwendig zu sein. Es handelt sich hierbei um die Elektronik die das Bussystem bedient und steuert. Diese ist keine eigenständige Leiterkarte, sondern befindet sich auf dem neuen Main. Wir haben dies einfach nur der Übersicht wegen so getauft, da es bei uns auch mal im Gespräch war eine eigenständige Leiterplatte für die 1.2 zu machen. Jedoch werden wir diesen Schritt nur gehen, wenn wir erkennen das auch für die 0.5, 1.2 und 1.2A ein Bedarf da ist. Ansonsten ist dies nur ein Stück Elektronik das sich auf der neuen Main wiederfindet.
Ich stelle Euch hier mal ein Bild rein, damit ihr sehen könnt das die ganzen "intelligenten Sensoren" erst an der 1.2 gesteste werden und das sehr ausgiebig, damit wir nicht mit Kinderkrankheiten starten sondern sagen können die sind fertig.
Im Grunde handelt es sich für die Sensorik nur um zwei Leiterkarten-Typen die nur durch die Software ihre endgültige Funktion erhalten und das eben passend zu alt und neu.
Hier seht ihr die bekannte Bumper-Duino die mit einer anderen Software und den Empfängern zur Perimeter-Duino wird weiterhin erfüllt diese Leiterplatte in Verbindung mit einer IMU 6050 auch den aktiven Anhebeschutz (die roten Teile im Bild) der von uns gerade getestet wird. Die ganze Karte ist auch von den Beschriftungen bis zu den Belegungen konsistent so dass die dazugehörige Beschreibung eindeutiger gestaltet werden kann als es bisher möglich war. Somit haben es auch unerfahrene Anwender leichter.
Die zweite Leiterplatte ist die Sensor-Duino sie schlägt die Brücke zu allen anderen Sensoren wie Ultraschall, weitere analoge Sensoren wie z.B. den Abstandssensor von Sharp oder was auch immer analoge oder digitale Infos liefert. Ein oneWireBus wird ebenso unterstützt wie der TWI-BUS(i2C). Damit kann dann jeder Sensor auch wenn er etwas aufwendiger ist an die 1.2 angeschlossen werden oder in das Bussystem der kommenden Generation integriert werden.
So ich hoffe etwas Licht ins Dunkel gebracht zu haben.
Gruß
Euer
Jürgen
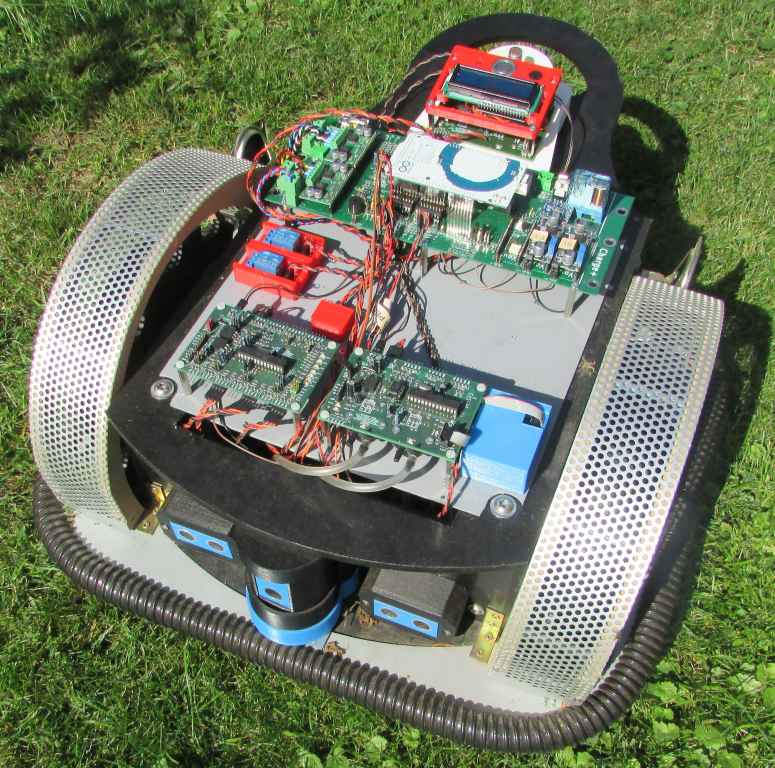
Bild Test-Aufbau
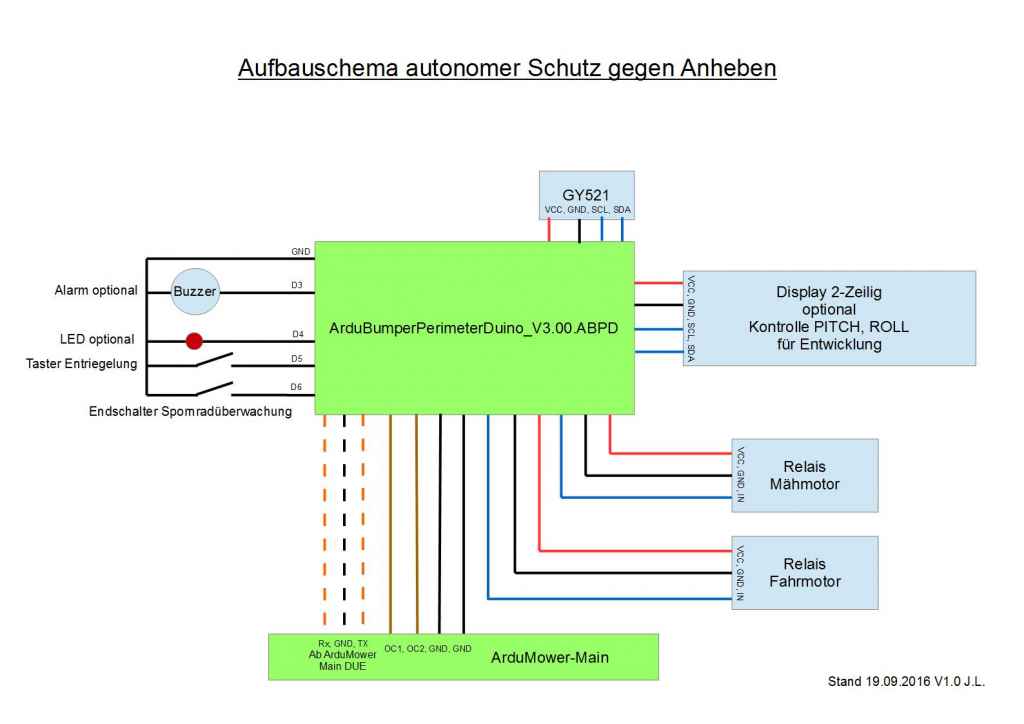
Bild Aufbauschema autonomer Schutz gegen Anheben
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2370/IMG_1017.jpg/
eine kurze Erklärung scheint hier zum Connect-Duino notwendig zu sein. Es handelt sich hierbei um die Elektronik die das Bussystem bedient und steuert. Diese ist keine eigenständige Leiterkarte, sondern befindet sich auf dem neuen Main. Wir haben dies einfach nur der Übersicht wegen so getauft, da es bei uns auch mal im Gespräch war eine eigenständige Leiterplatte für die 1.2 zu machen. Jedoch werden wir diesen Schritt nur gehen, wenn wir erkennen das auch für die 0.5, 1.2 und 1.2A ein Bedarf da ist. Ansonsten ist dies nur ein Stück Elektronik das sich auf der neuen Main wiederfindet.
Ich stelle Euch hier mal ein Bild rein, damit ihr sehen könnt das die ganzen "intelligenten Sensoren" erst an der 1.2 gesteste werden und das sehr ausgiebig, damit wir nicht mit Kinderkrankheiten starten sondern sagen können die sind fertig.
Im Grunde handelt es sich für die Sensorik nur um zwei Leiterkarten-Typen die nur durch die Software ihre endgültige Funktion erhalten und das eben passend zu alt und neu.
Hier seht ihr die bekannte Bumper-Duino die mit einer anderen Software und den Empfängern zur Perimeter-Duino wird weiterhin erfüllt diese Leiterplatte in Verbindung mit einer IMU 6050 auch den aktiven Anhebeschutz (die roten Teile im Bild) der von uns gerade getestet wird. Die ganze Karte ist auch von den Beschriftungen bis zu den Belegungen konsistent so dass die dazugehörige Beschreibung eindeutiger gestaltet werden kann als es bisher möglich war. Somit haben es auch unerfahrene Anwender leichter.
Die zweite Leiterplatte ist die Sensor-Duino sie schlägt die Brücke zu allen anderen Sensoren wie Ultraschall, weitere analoge Sensoren wie z.B. den Abstandssensor von Sharp oder was auch immer analoge oder digitale Infos liefert. Ein oneWireBus wird ebenso unterstützt wie der TWI-BUS(i2C). Damit kann dann jeder Sensor auch wenn er etwas aufwendiger ist an die 1.2 angeschlossen werden oder in das Bussystem der kommenden Generation integriert werden.
So ich hoffe etwas Licht ins Dunkel gebracht zu haben.
Gruß
Euer
Jürgen
Bild Test-Aufbau
Bild Aufbauschema autonomer Schutz gegen Anheben
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2370/IMG_1017.jpg/
Zuletzt bearbeitet von einem Moderator:
")
{kind=link}
{kind=link}