Okej I will detete those files.
I have manged to do the Localization in 2D with 360 degree LiDAR.
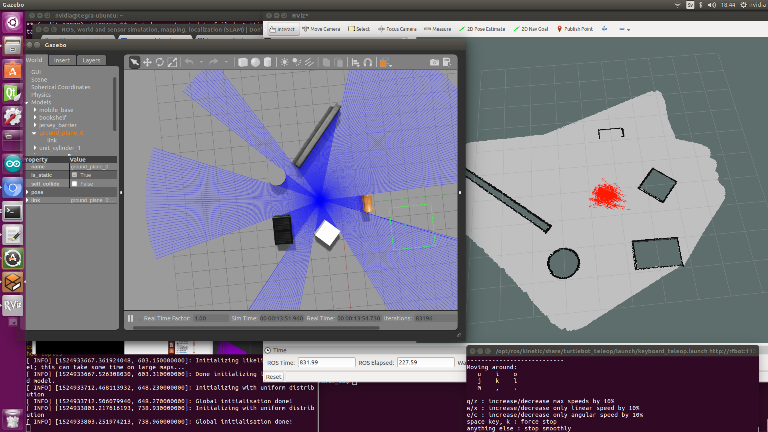
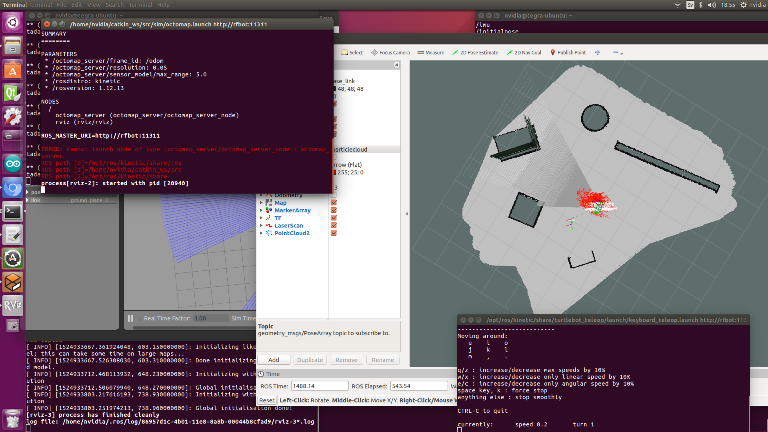
But then I try to launch the octomap.launch i get this error:
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/4372/Screenshotfrom2018-04-2818-44-56.png/
I have manged to do the Localization in 2D with 360 degree LiDAR.
But then I try to launch the octomap.launch i get this error:
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/4372/Screenshotfrom2018-04-2818-44-56.png/
Zuletzt bearbeitet von einem Moderator:
") - Maybe you have to terminate the gmapping/amcl first (CTRL+C) ?
- Maybe you have to terminate the gmapping/amcl first (CTRL+C) ? 

{kind=link}
{kind=link}
{kind=link}