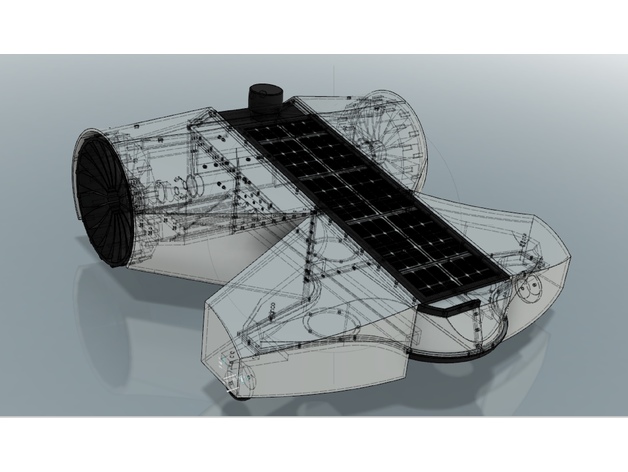
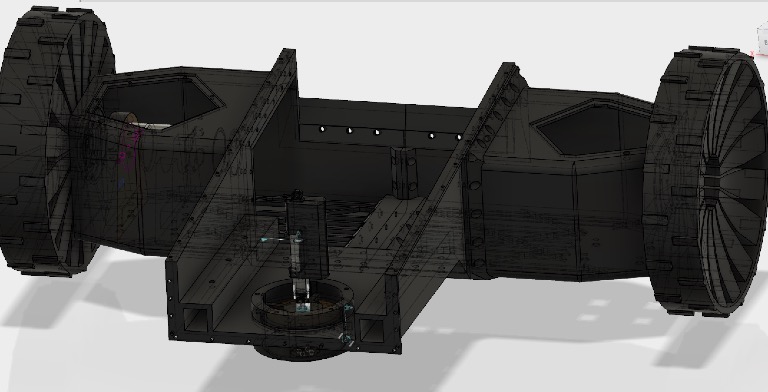
Hi All, Very Nice Forum. I wanted to share my project. I am currently building my own custom lawnmower. The name is Valify.
You Can follow my build blog over at http://valify.se and most of the parts are available Thiniverse
Please note that this thing is still a Work in Progress. Files, instructions, and other stuff might change as the project moves on.
Some hardware specs:
Jetson TX2 Development Kit
Scanse Sweep
Intel® RealSense™ Camera ZR300
2x DC Planetary Geared Motor 24 Volt med Hall IC 30-33 RPM 8mm
2x Vapex Li-Po Battery 6S 22.2V 4000mAh 25C XT60
SparkFun 9DoF
RoboClaw 2x45A ST
Emlid Reach — RTK GNSS modules
(Mower motors for the blades I have not decided yet.)
As always I enjoy feedback both negative and positive.")
Thanks
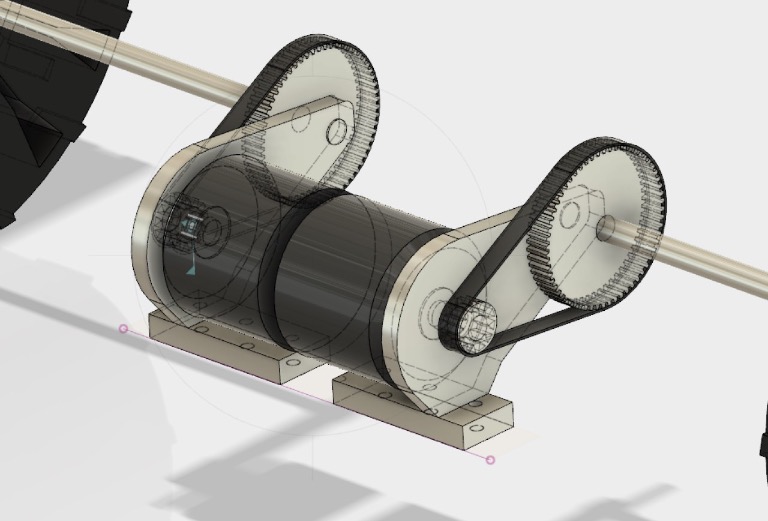
Some Pictures of the design:
You Can follow my build blog over at http://valify.se and most of the parts are available Thiniverse
Please note that this thing is still a Work in Progress. Files, instructions, and other stuff might change as the project moves on.
Some hardware specs:
Jetson TX2 Development Kit
Scanse Sweep
Intel® RealSense™ Camera ZR300
2x DC Planetary Geared Motor 24 Volt med Hall IC 30-33 RPM 8mm
2x Vapex Li-Po Battery 6S 22.2V 4000mAh 25C XT60
SparkFun 9DoF
RoboClaw 2x45A ST
Emlid Reach — RTK GNSS modules
(Mower motors for the blades I have not decided yet.)
As always I enjoy feedback both negative and positive.
Thanks
Some Pictures of the design:




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}