Fährt dein Alfred gerade den Bahnen entlang? Ich habe gestern nach langer Zeit meinen Alfred mal wieder laufen lassen und war erst mal etwas erstaunt was er da macht. Start und Endpunkt war ok, aber dazwischen ist er immer einen leichten Bogen schräg über die Mählinien der APP gefahren, zweimal auch über den äußeren Perimeter. Da sind wohl noch Bugs in der FW288. Nach nochmaligen Aus- und Einschalten war wieder alles normal.
Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Starke Spurabweichung (Drift) nach längerer Einschaltzeit
- Ersteller W1976
- Erstellt am
Hallo @W1976,
dieses Verhalten kenne ich leider von meinem ArduMower ebenfalls. Es tritt immer nach ca. 4-5 Stunden im eingeschalteten Zustand auf.
Vielleicht kannst Du das bei Deinem auch einmal testen, ob das auftritt, wenn er längere Zeit eingeschaltet bleibt. (Also sich nicht im IDLE abschaltet).
Bei meinem ArduMower kommt es nach längerer Zeit im eingeschalteten Zustand dazu, dass er beim Anfahren von Wegpunkten die Spur nicht hält.
Ausgangspunkt:
- der Mäher ist geladen und wird eingeschaltet (vorher spannungslos gewesen) und steht in der Ladestation.
- Status ist charge. Map ist übertragen und Mähvorgang wird gestartet.
- Speed ist auf 0,50m/s eingestellt.
- Mäher arbeitet alles ohne Probleme ab. Hält sauber die Spur (Abweichungen auf gerader Strecke max +/- 0,03m. An Wendepunkten kann es schon mal +/-0.05m werden.
- Mäher fährt zur Ladestation und bleibt im Zustand charge.
- Am nächsten Morgen wird der Mähvorgang erneut gestartet, ohne einen powercycle zu machen.
- Er hat beim anfahren von Wegpunkten deutliche Kursabweichungen von bis zu +/-0.70m !!! und muss immer mal wieder stark nachkorrigieren.
- Auch bei langsamer Geschwindigkeit (0,21 m/s) ist er nur am hin und her Pendeln.
Zu erst hatte ich die IMU im Verdacht, dass diese eventuell eine Drift hat, da nur einmal die Kalibrierung nach Neustart erfolgt. Habe daraufhin eine Programmänderung gemacht, die es mir möglich machte die Kalibrierung per "FINISH AND RESTART" Taste aus der App durchzuführen. Leider blieb das Verhalten trotz neuer Kalibrierung bestehen. Was bisher bei dem Problem geholfen hat war einen "REBOOT ROBOT" durchzuführen. Anschließend fährt er wieder, als wäre nichts gewesen.
Ich bin bei diesem Phänomen leider noch nicht weiter gekommen. Dieses Verhalten habe ich bisher bei den Release Versionen 1.0.219, 230 und 286 feststellen können. Jüngere Releases habe ich noch nicht getestet.
Gruß Sven
dieses Verhalten kenne ich leider von meinem ArduMower ebenfalls. Es tritt immer nach ca. 4-5 Stunden im eingeschalteten Zustand auf.
Vielleicht kannst Du das bei Deinem auch einmal testen, ob das auftritt, wenn er längere Zeit eingeschaltet bleibt. (Also sich nicht im IDLE abschaltet).
Bei meinem ArduMower kommt es nach längerer Zeit im eingeschalteten Zustand dazu, dass er beim Anfahren von Wegpunkten die Spur nicht hält.
Ausgangspunkt:
- der Mäher ist geladen und wird eingeschaltet (vorher spannungslos gewesen) und steht in der Ladestation.
- Status ist charge. Map ist übertragen und Mähvorgang wird gestartet.
- Speed ist auf 0,50m/s eingestellt.
- Mäher arbeitet alles ohne Probleme ab. Hält sauber die Spur (Abweichungen auf gerader Strecke max +/- 0,03m. An Wendepunkten kann es schon mal +/-0.05m werden.
- Mäher fährt zur Ladestation und bleibt im Zustand charge.
- Am nächsten Morgen wird der Mähvorgang erneut gestartet, ohne einen powercycle zu machen.
- Er hat beim anfahren von Wegpunkten deutliche Kursabweichungen von bis zu +/-0.70m !!! und muss immer mal wieder stark nachkorrigieren.
- Auch bei langsamer Geschwindigkeit (0,21 m/s) ist er nur am hin und her Pendeln.
Zu erst hatte ich die IMU im Verdacht, dass diese eventuell eine Drift hat, da nur einmal die Kalibrierung nach Neustart erfolgt. Habe daraufhin eine Programmänderung gemacht, die es mir möglich machte die Kalibrierung per "FINISH AND RESTART" Taste aus der App durchzuführen. Leider blieb das Verhalten trotz neuer Kalibrierung bestehen. Was bisher bei dem Problem geholfen hat war einen "REBOOT ROBOT" durchzuführen. Anschließend fährt er wieder, als wäre nichts gewesen.
Ich bin bei diesem Phänomen leider noch nicht weiter gekommen. Dieses Verhalten habe ich bisher bei den Release Versionen 1.0.219, 230 und 286 feststellen können. Jüngere Releases habe ich noch nicht getestet.
Gruß Sven
Zuletzt bearbeitet:
EinEinfach
Well-known member
Versuch mal beim nächsten Mal, wenn er schiefe Bahnen fährt den Debug Modus zu aktivieren und die Stanley Parameter mit dem Schieber auf die Werte zu schieben die in deiner Config sind, ich bin der Meinung danach fängt er sichWas bisher bei dem Problem geholfen hat war einen "REBOOT ROBOT" durchzuführen. Anschließend fährt er wieder, als wäre nichts gewesen.
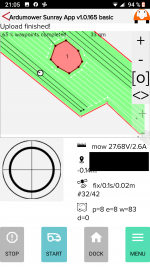
Das hier war gestern vom Alfred, der war aus, stand aber in der Ladestation. Eingeschaltet, Karte hochgeladen und dann das Bild, leider sieht man nicht das er am Schluss wieder am Zielpunkt ist. Er fährt der ganz leicht erkennbaren hellroten Linie nach, nur am Ende der Bahn machte er in diesem Bild den Schwenk nach links zum GPS Punkt. Beim Ardumower habe ich es noch nicht beobachtet. Nur sind mir manchmal Streifen stehen geblieben die vermutlich einen Hinweis darauf sind. Mit den Stanley Parameter muss ich mal probieren, könnte sein das die APP die eingestellten Stanley Parameter überschreibt.
Anhänge
Hallo @EinEinach,
das mit den Stanley Parametern kann ich gerne einmal ausprobieren. Allerdings hatte ich diese auch schon in Verdacht und hatte Sie bei den ersten Versuchen mit loggen lassen. Ich habe hier einmal ein Log von den gleichen Mähpunkten. Einmal mit starker Abweichung im Fahrverhalten:
Und einmal, wo er schön sauber die Spur hält:
Bitte nicht über den k Wert wundern. Dieser wurde bei der Sunray-Version mit der ich diese Logs erstellt hatte, in Abhängigkeit zur Fahrgeschwindigkeit skaliert.
Bei beiden Logs ist der p und k Wert nahezu identisch, doch die Unterschiede in der Abweichung sind enorm.
Gruß Sven
das mit den Stanley Parametern kann ich gerne einmal ausprobieren. Allerdings hatte ich diese auch schon in Verdacht und hatte Sie bei den ersten Versuchen mit loggen lassen. Ich habe hier einmal ein Log von den gleichen Mähpunkten. Einmal mit starker Abweichung im Fahrverhalten:
Code:
07:34:45.583 -> dumpState: X=-31.77 Y=-2.26 delta=0.89 mapCRC=-3645135 mowPointsIdx=551 dockPointsIdx=1 freePointsIdx=1 wayMode=3 op=1 sensor=0 sonar.enabled=1 fixTimeout=100 absolutePosSource=0 lon=0.00 lat=0.00
07:34:45.583 -> save state... ok
07:34:46.431 -> Angular: 0.19 p: 3.00 tDiffDelta: 0.03 k: 0.68 lErr: 0.04 lSpeedSet: 0.34 angleToTargetFits: 1
07:34:47.417 -> Angular: -0.32 p: 3.00 tDiffDelta: -0.10 k: 0.99 lErr: -0.01 lSpeedSet: 0.49 angleToTargetFits: 1
07:34:48.442 -> Angular: -0.27 p: 3.00 tDiffDelta: -0.07 k: 1.00 lErr: -0.03 lSpeedSet: 0.50 angleToTargetFits: 1
07:34:49.413 -> Angular: -0.31 p: 3.00 tDiffDelta: -0.07 k: 1.00 lErr: -0.05 lSpeedSet: 0.50 angleToTargetFits: 1
07:34:50.470 -> Angular: -0.33 p: 3.00 tDiffDelta: -0.06 k: 1.00 lErr: -0.08 lSpeedSet: 0.50 angleToTargetFits: 1
07:34:51.087 -> 12:4:28 ctlDur=0.02 op=Mow freem=219715 sp=297471E bat=27.29(0.71) chg=0.06(0.01) tg=-24.55,5.03 x=-30.31 y=-0.61 delta=0.84 tow=106508400 lon=10 lat=53 h=64.4 n=-0.58 e=-30.28 d=3.70 sol=2 age=0.07
07:34:51.896 -> Angular: -0.34 p: 3.00 tDiffDelta: -0.06 k: 1.00 lErr: -0.09 lSpeedSet: 0.50 angleToTargetFits: 1
07:34:52.441 -> Angular: -0.36 p: 3.00 tDiffDelta: -0.05 k: 1.00 lErr: -0.11 lSpeedSet: 0.50 angleToTargetFits: 1
07:34:53.429 -> Angular: -0.28 p: 3.00 tDiffDelta: -0.02 k: 1.00 lErr: -0.11 lSpeedSet: 0.50 angleToTargetFits: 1
07:34:54.425 -> Angular: -0.22 p: 3.00 tDiffDelta: -0.00 k: 1.00 lErr: -0.11 lSpeedSet: 0.50 angleToTargetFits: 1
07:34:55.467 -> Angular: -0.14 p: 3.00 tDiffDelta: 0.00 k: 1.00 lErr: -0.08 lSpeedSet: 0.50 angleToTargetFits: 1
07:34:56.020 -> 12:4:33 ctlDur=0.02 op=Mow freem=219715 sp=2975AA9 bat=27.28(0.73) chg=0.08(0.01) tg=-24.55,5.03 x=-28.45 y=1.23 delta=0.77 tow=106513400 lon=10 lat=53 h=64.4 n=1.28 e=-28.44 d=3.71 sol=2 age=0.16
07:34:56.506 -> Angular: -0.03 p: 3.00 tDiffDelta: 0.04 k: 1.00 lErr: -0.08 lSpeedSet: 0.50 angleToTargetFits: 1
07:34:57.438 -> Angular: 0.16 p: 3.00 tDiffDelta: 0.07 k: 0.99 lErr: -0.03 lSpeedSet: 0.49 angleToTargetFits: 1
07:34:58.460 -> Angular: 0.54 p: 3.00 tDiffDelta: 0.15 k: 0.99 lErr: 0.04 lSpeedSet: 0.49 angleToTargetFits: 1
07:34:59.444 -> Angular: 0.78 p: 3.00 tDiffDelta: 0.18 k: 0.99 lErr: 0.12 lSpeedSet: 0.49 angleToTargetFits: 1
07:35:00.468 -> Angular: 1.20 p: 3.00 tDiffDelta: 0.26 k: 0.99 lErr: 0.22 lSpeedSet: 0.49 angleToTargetFits: 1
07:35:01.044 -> 12:4:38 ctlDur=0.02 op=Mow freem=219715 sp=2976E33 bat=27.27(0.72) chg=0.07(0.01) tg=-24.55,5.03 x=-26.36 y=2.91 delta=0.60 tow=106518400 lon=10 lat=53 h=64.4 n=2.87 e=-26.41 d=3.67 sol=2 age=0.13
07:35:01.815 -> Angular: 1.55 p: 3.00 tDiffDelta: 0.33 k: 0.99 lErr: 0.32 lSpeedSet: 0.49 angleToTargetFits: 1
07:35:02.447 -> Angular: 1.90 p: 3.00 tDiffDelta: 0.41 k: 1.00 lErr: 0.40 lSpeedSet: 0.50 angleToTargetFits: 1
07:35:04.408 -> Angular: 1.77 p: 3.00 tDiffDelta: 0.07 k: 0.10 lErr: 0.57 lSpeedSet: 0.00 angleToTargetFits: 1
07:35:04.756 -> Angular: 1.68 p: 3.00 tDiffDelta: 0.07 k: 0.10 lErr: 0.57 lSpeedSet: 0.00 angleToTargetFits: 1
07:35:05.448 -> Angular: -0.28 p: 3.00 tDiffDelta: -0.34 k: 0.50 lErr: 0.46 lSpeedSet: 0.25 angleToTargetFits: 1
07:35:05.988 -> 12:4:43 ctlDur=0.02 op=Mow freem=219715 sp=29781BC bat=27.28(0.70) chg=0.07(0.01) tg=-24.55,5.03 x=-24.77 y=4.16 delta=1.68 tow=106523400 lon=10 lat=53 h=64.4 n=4.15 e=-24.77 d=3.69 sol=2 age=0.07
07:35:06.465 -> Angular: -0.34 p: 3.00 tDiffDelta: -0.26 k: 0.98 lErr: 0.23 lSpeedSet: 0.49 angleToTargetFits: 1
07:35:09.596 -> Angular: -1.79 p: 3.00 tDiffDelta: -0.33 k: 0.10 lErr: -0.11 lSpeedSet: 0.01 angleToTargetFits: 1
07:35:10.575 -> 12:4:48 ctlDur=0.02 op=Mow freem=219715 sp=2979547 bat=27.29(0.67) chg=0.08(0.01) tg=-24.55,5.03 x=-24.56 y=5.13 delta=-1.39 tow=106528400 lon=10 lat=53 h=64.5 n=5.13 e=-24.56 d=3.66 sol=2 age=0.11
07:35:11.251 -> Angular: -0.39 p: 3.00 tDiffDelta: -0.08 k: 0.24 lErr: -0.07 lSpeedSet: 0.12 angleToTargetFits: 1
07:35:11.251 -> clearObstacles
07:35:13.561 -> Angular: -0.44 p: 3.00 tDiffDelta: -0.16 k: 0.10 lErr: 0.00 lSpeedSet: 0.01 angleToTargetFits: 1
07:35:14.574 -> Angular: 0.64 p: 3.00 tDiffDelta: 0.20 k: 0.33 lErr: 0.02 lSpeedSet: 0.16 angleToTargetFits: 1
07:35:15.562 -> clearObstacles
07:35:16.072 -> 12:4:53 ctlDur=0.02 op=Mow freem=219715 sp=297A8D1 bat=27.30(0.63) chg=0.09(0.01) tg=-31.86,-1.97 x=-24.67 y=5.19 delta=2.57 tow=106533400 lon=10 lat=53 h=64.5 n=5.19 e=-24.67 d=3.66 sol=2 age=0.12
07:35:16.072 -> dumpState: X=-24.67 Y=5.19 delta=2.57 mapCRC=-3645135 mowPointsIdx=553 dockPointsIdx=1 freePointsIdx=1 wayMode=3 op=1 sensor=0 sonar.enabled=1 fixTimeout=100 absolutePosSource=0 lon=0.00 lat=0.00Und einmal, wo er schön sauber die Spur hält:
Code:
20:07:22.396 -> dumpState: X=-31.78 Y=-2.26 delta=1.77 mapCRC=-3645135 mowPointsIdx=551 dockPointsIdx=3 freePointsIdx=3 wayMode=3 op=1 sensor=0 sonar.enabled=1 fixTimeout=100 absolutePosSource=0 lon=0.00 lat=0.00
20:07:22.396 -> save state... ok
20:07:22.855 -> 0:37:31 ctlDur=0.02 op=Mow freem=224907 sp=225BB5 bat=24.85(0.69) chg=0.06(0.01) tg=-24.55,5.03 x=-31.78 y=-2.26 delta=1.71 tow=65260400 lon=10 lat=53 h=64.5 n=-2.26 e=-31.78 d=3.62 sol=2 age=3.09
20:07:23.323 -> Angular: -0.33 p: 3.00 tDiffDelta: -0.23 k: 0.10 lErr: 0.04 lSpeedSet: 0.01 angleToTargetFits: 1
20:07:24.349 -> Angular: 0.12 p: 3.00 tDiffDelta: 0.01 k: 0.51 lErr: 0.05 lSpeedSet: 0.25 angleToTargetFits: 1
20:07:25.399 -> Angular: -0.17 p: 3.00 tDiffDelta: -0.07 k: 0.97 lErr: 0.01 lSpeedSet: 0.48 angleToTargetFits: 1
20:07:26.333 -> Angular: -0.02 p: 3.00 tDiffDelta: -0.01 k: 1.00 lErr: 0.01 lSpeedSet: 0.50 angleToTargetFits: 1
20:07:27.329 -> Angular: -0.00 p: 3.00 tDiffDelta: -0.01 k: 1.00 lErr: 0.01 lSpeedSet: 0.50 angleToTargetFits: 1
20:07:27.805 -> 0:37:36 ctlDur=0.02 op=Mow freem=224907 sp=226F3E bat=24.84(0.69) chg=0.07(0.01) tg=-24.55,5.03 x=-30.72 y=-1.17 delta=0.81 tow=65265400 lon=10 lat=53 h=64.5 n=-1.25 e=-30.79 d=3.68 sol=2 age=0.23
20:07:28.328 -> Angular: 0.08 p: 3.00 tDiffDelta: 0.02 k: 0.99 lErr: 0.01 lSpeedSet: 0.49 angleToTargetFits: 1
20:07:29.342 -> Angular: 0.11 p: 3.00 tDiffDelta: 0.01 k: 0.99 lErr: 0.04 lSpeedSet: 0.49 angleToTargetFits: 1
20:07:30.364 -> Angular: -0.03 p: 3.00 tDiffDelta: -0.04 k: 1.00 lErr: 0.04 lSpeedSet: 0.50 angleToTargetFits: 1
20:07:31.485 -> Angular: -0.00 p: 3.00 tDiffDelta: -0.03 k: 0.99 lErr: 0.04 lSpeedSet: 0.49 angleToTargetFits: 1
20:07:32.585 -> Angular: -0.13 p: 3.00 tDiffDelta: -0.06 k: 0.99 lErr: 0.02 lSpeedSet: 0.49 angleToTargetFits: 1
20:07:33.752 -> 0:37:41 ctlDur=0.02 op=Mow freem=224907 sp=2282C9 bat=24.83(0.71) chg=0.06(0.01) tg=-24.55,5.03 x=-29.04 y=0.54 delta=0.85 tow=65270400 lon=10 lat=53 h=64.4 n=0.46 e=-29.11 d=3.68 sol=2 age=0.21
20:07:33.752 -> Angular: -0.11 p: 3.00 tDiffDelta: -0.03 k: 0.99 lErr: -0.01 lSpeedSet: 0.49 angleToTargetFits: 1
20:07:35.118 -> Angular: 0.06 p: 3.00 tDiffDelta: 0.00 k: 1.00 lErr: 0.03 lSpeedSet: 0.50 angleToTargetFits: 1
20:07:36.142 -> Angular: 0.01 p: 3.00 tDiffDelta: -0.02 k: 0.99 lErr: 0.03 lSpeedSet: 0.49 angleToTargetFits: 1
20:07:37.388 -> Angular: -0.02 p: 3.00 tDiffDelta: -0.01 k: 1.00 lErr: 0.01 lSpeedSet: 0.50 angleToTargetFits: 1
20:07:37.388 -> Angular: -0.10 p: 3.00 tDiffDelta: -0.01 k: 1.00 lErr: -0.04 lSpeedSet: 0.50 angleToTargetFits: 1
20:07:38.365 -> 0:37:46 ctlDur=0.02 op=Mow freem=224907 sp=229653 bat=24.83(0.70) chg=0.06(0.01) tg=-24.55,5.03 x=-27.36 y=2.26 delta=0.77 tow=65275400 lon=10 lat=53 h=64.5 n=2.19 e=-27.43 d=3.67 sol=2 age=0.26
20:07:39.162 -> Angular: 0.18 p: 3.00 tDiffDelta: 0.06 k: 1.00 lErr: 0.01 lSpeedSet: 0.50 angleToTargetFits: 1
20:07:40.232 -> Angular: -0.00 p: 3.00 tDiffDelta: -0.01 k: 1.00 lErr: 0.01 lSpeedSet: 0.50 angleToTargetFits: 1
20:07:41.451 -> Angular: -0.05 p: 3.00 tDiffDelta: -0.02 k: 1.00 lErr: 0.01 lSpeedSet: 0.50 angleToTargetFits: 1
20:07:41.451 -> Angular: 0.04 p: 3.00 tDiffDelta: 0.01 k: 1.00 lErr: 0.01 lSpeedSet: 0.50 angleToTargetFits: 1
20:07:42.618 -> Angular: 0.08 p: 3.00 tDiffDelta: 0.03 k: 1.00 lErr: 0.00 lSpeedSet: 0.50 angleToTargetFits: 1
20:07:43.618 -> 0:37:51 ctlDur=0.02 op=Mow freem=224907 sp=22A9DC bat=24.83(0.71) chg=0.06(0.01) tg=-24.55,5.03 x=-25.64 y=3.91 delta=0.77 tow=65280400 lon=10 lat=53 h=64.5 n=3.86 e=-25.70 d=3.66 sol=2 age=0.26
20:07:44.234 -> Angular: 0.08 p: 3.00 tDiffDelta: 0.02 k: 0.99 lErr: 0.01 lSpeedSet: 0.49 angleToTargetFits: 1
20:07:45.698 -> Angular: -0.05 p: 3.00 tDiffDelta: -0.03 k: 0.99 lErr: 0.02 lSpeedSet: 0.49 angleToTargetFits: 1
20:07:45.698 -> Angular: 0.05 p: 3.00 tDiffDelta: 0.01 k: 0.96 lErr: 0.01 lSpeedSet: 0.48 angleToTargetFits: 1
20:07:46.619 -> clearObstacles
20:07:47.607 -> dumpState: X=-24.53 Y=5.10 delta=1.70 mapCRC=-3645135 mowPointsIdx=552 dockPointsIdx=3 freePointsIdx=3 wayMode=3 op=1 sensor=0 sonar.enabled=1 fixTimeout=100 absolutePosSource=0 lon=0.00 lat=0.00
20:07:47.607 -> save state... ok
20:07:47.607 -> Angular: 1.50 p: 3.00 tDiffDelta: 0.33 k: 0.10 lErr: 0.06 lSpeedSet: 0.01 angleToTargetFits: 1
20:07:48.477 -> 0:37:56 ctlDur=0.02 op=Mow freem=224907 sp=22BD65 bat=24.83(0.67) chg=0.07(0.01) tg=-24.69,5.20 x=-24.53 y=5.10 delta=2.25 tow=65285400 lon=10 lat=53 h=64.5 n=5.10 e=-24.53 d=3.64 sol=2 age=0.19
20:07:49.453 -> Angular: 0.09 p: 3.00 tDiffDelta: 0.01 k: 0.35 lErr: 0.03 lSpeedSet: 0.17 angleToTargetFits: 1
20:07:49.453 -> clearObstacles
20:07:50.632 -> Angular: 0.48 p: 3.00 tDiffDelta: 0.26 k: 0.10 lErr: -0.04 lSpeedSet: 0.01 angleToTargetFits: 1
20:07:51.640 -> Angular: -0.12 p: 3.00 tDiffDelta: -0.03 k: 0.50 lErr: -0.02 lSpeedSet: 0.25 angleToTargetFits: 1
20:07:52.697 -> dumpState: X=-24.83 Y=5.02 delta=-2.33 mapCRC=-3645135 mowPointsIdx=553 dockPointsIdx=3 freePointsIdx=3 wayMode=3 op=1 sensor=0 sonar.enabled=1 fixTimeout=100 absolutePosSource=0 lon=0.00 lat=0.00Bitte nicht über den k Wert wundern. Dieser wurde bei der Sunray-Version mit der ich diese Logs erstellt hatte, in Abhängigkeit zur Fahrgeschwindigkeit skaliert.
Bei beiden Logs ist der p und k Wert nahezu identisch, doch die Unterschiede in der Abweichung sind enorm.
Gruß Sven
eRacoon
Active member
Kann gleiches Bestätigen, hab die Tage die JYQD 2021 Treiber eingebaut als Gear Treiber, der erste Test (Umbau natürlich Stromlos) war extrem genau.dieses Verhalten kenne ich leider von meinem ArduMower ebenfalls. Es tritt immer nach ca. 4-5 Stunden im eingeschalteten Zustand auf.
Am nächsten Tag (nicht ausgeschaltet beim Laden) war er plötzlich wie auf 2 Promille unterwegs.
Einmal Reboot Robot und alles war wieder normal.
Das hatte ich auch als erstes versucht weil ich dachte ich hätte mich eventuell vertan in der Config.Versuch mal beim nächsten Mal, wenn er schiefe Bahnen fährt den Debug Modus zu aktivieren und die Stanley Parameter mit dem Schieber auf die Werte zu schieben die in deiner Config sind, ich bin der Meinung danach fängt er sich
Also deine Settings gesetzt via Debug (die auch in der Config korrekt waren, danach geprüft), aber wirklich besser war es nicht.
Erst der Reboot hat wirklich Besserung verschafft.
Falls hier noch mehr User mitlesen und Ihr der Meinung seid, dass dieses Phänomen bei Eurem Mäher nicht vorhanden ist, wäre es nett, wenn Ihr einmal folgendes testen könntet:
- Sicherstellen, dass sich der Mäher im IDLE nicht ausschaltet:
- Mäher in der Ladestationen einschalten (vom spannungslosen Zustand aus)
- eine Mähkarte mit möglichst langen Bahnen laden und per App mit dem „skip to progress“ Schieber eine Position einstellen, wo der Mäher bei einer langen Bahn starten würde und sich diesen Wert für spätere Versuche merken.
- den Mähvorgang starten und beobachten, ob der Mäher schön sauber seine Spur hält.
- nach einiger Zeit den Mäher zurück ins Dock schicken und Laden lassen.
- nach 10 oder mehr Stunden im eingeschalteten Zustand (bei Charge im Dock) den „skip to progress“ Schieber auf einen anderen Wert stellen und wieder zurück auf den Wert stellen, der für den ersten Versuch verwendet wurde.
- den Mähvorgang erneut starten.
- beobachten, ob der Mäher immer noch sauber seine Bahnen zieht, oder ob er deutliche Spurabweichungen hat. (Diese wird in der App glaube ich seit Sunray 1.0.230 angezeigt)

Wenn der Mäher jetzt starke Abweichungen von der Spur zeigt (deutlich mehr als im ersten Versuch) versucht bitte folgendes:
- Mäher stoppen (Stop per App)
- per App einen „Reboot Robot“ durchführen
- wenn der Mäher wieder startklar ist (stabiles GPS Fix) den Mähvorgang erneut starten.
Wenn er jetzt wieder seine Spur hält bitte hier einen Eintrag machen und folgende Angaben mit eintragen:
- verwendete Sunray-Version
- verwendete Treiber für die Antriebsmotore
- verwendete IMU
Wenn ihr diese starke Abweichung nach dem Versuch nicht feststellen konntet, bitte ebenfalls einen Eintrag mit den oben erwähnten Angaben machen.
Vielen Dank für Eure Unterstützung.
Gruß Sven
- Sicherstellen, dass sich der Mäher im IDLE nicht ausschaltet:
C++:
#define BAT_SWITCH_OFF_IDLE false // switch off if idle (JP8 must be set to autom.)- eine Mähkarte mit möglichst langen Bahnen laden und per App mit dem „skip to progress“ Schieber eine Position einstellen, wo der Mäher bei einer langen Bahn starten würde und sich diesen Wert für spätere Versuche merken.
- den Mähvorgang starten und beobachten, ob der Mäher schön sauber seine Spur hält.
- nach einiger Zeit den Mäher zurück ins Dock schicken und Laden lassen.
- nach 10 oder mehr Stunden im eingeschalteten Zustand (bei Charge im Dock) den „skip to progress“ Schieber auf einen anderen Wert stellen und wieder zurück auf den Wert stellen, der für den ersten Versuch verwendet wurde.
- den Mähvorgang erneut starten.
- beobachten, ob der Mäher immer noch sauber seine Bahnen zieht, oder ob er deutliche Spurabweichungen hat. (Diese wird in der App glaube ich seit Sunray 1.0.230 angezeigt)
Wenn der Mäher jetzt starke Abweichungen von der Spur zeigt (deutlich mehr als im ersten Versuch) versucht bitte folgendes:
- Mäher stoppen (Stop per App)
- per App einen „Reboot Robot“ durchführen
- wenn der Mäher wieder startklar ist (stabiles GPS Fix) den Mähvorgang erneut starten.
Wenn er jetzt wieder seine Spur hält bitte hier einen Eintrag machen und folgende Angaben mit eintragen:
- verwendete Sunray-Version
- verwendete Treiber für die Antriebsmotore
- verwendete IMU
Wenn ihr diese starke Abweichung nach dem Versuch nicht feststellen konntet, bitte ebenfalls einen Eintrag mit den oben erwähnten Angaben machen.
Vielen Dank für Eure Unterstützung.
Gruß Sven
EinEinfach
Well-known member
Also ich bin der Meinung, dass ich heute das gleiche Phänomen beobachten können. Allerdings fuhr er bei mir bis zum Reboot eher unruhig als ob die Stanley Parameter nicht passen würden. Und ich bin der Meinung er war deutlich schneller als die eingestellte Geschwindigkeit.
verwendete Sunray-Version: .276
- verwendete Treiber für die Antriebsmotore: ZS-X11D1 (JYQD2021)
- verwendete IMU: 6050
verwendete Sunray-Version: .276
- verwendete Treiber für die Antriebsmotore: ZS-X11D1 (JYQD2021)
- verwendete IMU: 6050
eRacoon
Active member
Gab es hier eigentlich mal irgendein Feedback zu, in der Regal starte ich meinen Roboter neu wenn ich ihn auf die Wiese setze.
Aber heute mal vergessen, hatte vor 3 Tagen glaube einen Teil gemäht und heute da weiter gemacht, war also 3 Tage ohne Reboot.
Ersten drei Bahnen in der Mitte vom Bild komplettes rum Geschlingere -> Restart -> alles wieder gut
Ich bleibe wohl besser bei meiner Routine den Roboter immer neuzustarten bevor ich loslege.
Aber heute mal vergessen, hatte vor 3 Tagen glaube einen Teil gemäht und heute da weiter gemacht, war also 3 Tage ohne Reboot.
Ersten drei Bahnen in der Mitte vom Bild komplettes rum Geschlingere -> Restart -> alles wieder gut
Ich bleibe wohl besser bei meiner Routine den Roboter immer neuzustarten bevor ich loslege.
Anhänge

EinEinfach
Well-known member
Feedback habe ich keins gelesen, wie gesagt ich habe das Gefühl der Rover fährt deutlich schneller als die eingestellte Geschwindigkeit, evtl sollte man auch in die Richtung analysieren
was ist eurer Gefühl?
was ist eurer Gefühl?
Hartmut
Active member
- verwendete Sunray-Version: 1.0.230
- verwendete Treiber für die Antriebsmotore: ZS-X11HV2 (JYQD 2021 gekauft)
- verwendete IMU: 6050
Mit dieser Version fährt der Ardumover korrekt grade Bahnen. Ich lasse ihn immer an und mähe den Rest Tage später wenns mit dem Wetter passt. Solche Schlangenlinien sind bei mir mit der 230 noch nie aufgetreten.
- verwendete Treiber für die Antriebsmotore: ZS-X11HV2 (JYQD 2021 gekauft)
- verwendete IMU: 6050
Mit dieser Version fährt der Ardumover korrekt grade Bahnen. Ich lasse ihn immer an und mähe den Rest Tage später wenns mit dem Wetter passt. Solche Schlangenlinien sind bei mir mit der 230 noch nie aufgetreten.
Anhänge

eRacoon
Active member
- verwendete Sunray-Version: 1.0.286
- verwendete Treiber für die Antriebsmotore: JYQD 2021
- verwendete IMU: 6050
Hatte das früher auch nicht, scheint irgendwann als Bug in die FW gewandert zu sein.
Mit der neusten .298 steht zu mindestens auch nichts in den Release Nodes dazu als Bugfix.
@EinEinach
Das war auch mein erster Verdacht heute, hatte 0.25 nochmal in der App eingestellt, das hat aber keine Besserung gebracht, hatte auch nicht das Gefühl dass er merklich langsamer geworden ist. Aber selbst wenn er bei mir schneller ist, so seltsame fast schon akkurate Schlangenlinien wie auf dem Bild fährt der dann auch nicht.
- verwendete Treiber für die Antriebsmotore: JYQD 2021
- verwendete IMU: 6050
Hatte das früher auch nicht, scheint irgendwann als Bug in die FW gewandert zu sein.
Mit der neusten .298 steht zu mindestens auch nichts in den Release Nodes dazu als Bugfix.
@EinEinach
Das war auch mein erster Verdacht heute, hatte 0.25 nochmal in der App eingestellt, das hat aber keine Besserung gebracht, hatte auch nicht das Gefühl dass er merklich langsamer geworden ist. Aber selbst wenn er bei mir schneller ist, so seltsame fast schon akkurate Schlangenlinien wie auf dem Bild fährt der dann auch nicht.
EinEinfach
Well-known member
Ich muss mal die Tage ein Video machen, was der Rover bei mir macht. Meiner schlängelt deutlich hin und her, nach dem Neustart ist alles wieder im Lot.
Jetzt steht er schon seit ein paar Tagen eingeschaltet, wird morgen sicherlich wieder schlängeln
Jetzt steht er schon seit ein paar Tagen eingeschaltet, wird morgen sicherlich wieder schlängeln