Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
sender area 2
- Ersteller andri85
- Erstellt am
Your stepdown is not OK (LM2596) only 2A
Use XL4015 instead.

 www.marotronics.de
www.marotronics.de
Use XL4015 instead.
Module abaisseur 5A DC-DC XL4015 avec dissipateur thermique, par exemple pour Ar, 2,79 €
Avec ce module, vous pouvez régler la tension d''entrée au moyen d''un potentiomètre
www.marotronics.de
Today at noon I disconnected the gps and since then I have not had any TRACEBACK errors. But this afternoon he lost the wifi connection, I had to disable the wifi and re-enable it (I have a usb antenna to increase the signal). Could it be the power supply? I found a module with XL4015 here at home. Tonight I try to replace LM2596. Do you use an external or internal wifi antenna of the raspberry?
In my case no problem when mower disconnect and reconnect on WIFI same access point, except if the connection is bad during the first 2 ou 3 minutes of start process.But i can't explain why the Pi freeze for certain duration only at start up.
I use the raspberry pi onboard wifi and on the roof of my house a Wavlink AC600 WIFI repeater.
Mower finish the job or watchdog was trig when connection is lost ???
I use the raspberry pi onboard wifi and on the roof of my house a Wavlink AC600 WIFI repeater.
Mower finish the job or watchdog was trig when connection is lost ???
If watchdog is trigger Due reset the status change to wait and state to OFF, Piardu close connection with a timeout " traceback ",so the red line in bottom of screen is freeze,but PI never freeze, only connection with DUE is broken and WIFI is never kill
It's strange that it's append inside your house because WIFI is normaly OK .
Maybe try with onboard Pi WIFI
It's strange that it's append inside your house because WIFI is normaly OK .
Maybe try with onboard Pi WIFI
the robot never turned off by itself. however it is set to 300 minutes .. every now and then I make it do manual movements to keep it from turning off .. this morning, however, everything is okk ... I have no traceback errors and the wifi is stable ... maybe it was a series of problems due from the gps and from the power supply a little underpowered ... now I see if by tonight it has no problem I reassemble it and on Saturday I put it in the garden
Hi Bernd,The L298N have 2 output A and B ,so it's possible to use 2 perimeters wires with the same sender.
Useful on really particular config area
But code have to be adjust.
I want to use 2 perimeters with one transmitter.
What do I need to change in the code?
I use PiArdu525.py
Yes, I use RFID and it should drive fully automatically.I need more info :
Do you use RFID and want mower to run in full auto mode ?
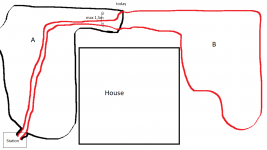
I assume your first area is the charging station area (connected on output A on the L298N driver) and the area 2 is connected to output B
Anhänge

Hi.
You need to use v1.63 of Azuritber, Pyardu526 and the last version of the sender.
Update is necessary because in the last sender version : if mower is not in the station the station area signal always restart.
in the sender new version you have a new setting to avoid auto restart the output A signal.
Into raspberry config.py, you need to set area2 IP adress to the same as area1 (same sender)
You need to use v1.63 of Azuritber, Pyardu526 and the last version of the sender.
Update is necessary because in the last sender version : if mower is not in the station the station area signal always restart.
in the sender new version you have a new setting to avoid auto restart the output A signal.
#define AUTO_START_SIGNAL 0 //use to start sender when mower leave station
Into raspberry config.py, you need to set area2 IP adress to the same as area1 (same sender)
For esp32 i use arduino ide ,my laptop and a cable (The possible OTA esp32 is not use because need too many space on esp32).
For raspberry i use VNC to copy and paste pyardu file from my PC to PI.
For DUE i use arduino ide on my PC , compile the project on the PC , send the binary file ardumower.ino.elf to PI using VNC and use pyardu / setting / Update the DUE firmware to flash arduino due.
I have on my mower a small external switch that change JP8 from auto to always On mode to avoid PCB1.3 stop during flashing but maybe a workaround on PCB with a bigger capacitor can do the stuff.
For raspberry i use VNC to copy and paste pyardu file from my PC to PI.
For DUE i use arduino ide on my PC , compile the project on the PC , send the binary file ardumower.ino.elf to PI using VNC and use pyardu / setting / Update the DUE firmware to flash arduino due.
I have on my mower a small external switch that change JP8 from auto to always On mode to avoid PCB1.3 stop during flashing but maybe a workaround on PCB with a bigger capacitor can do the stuff.
Yes it's possible.I think because I didn't switch JP8.
In this case you need to flash again using programming port.
Other possibility is a software arduino ide folder location. Simply test DueFlash.py alone with python idle3 to see if software is ok or not.
For JP8 you have the workarround into sunray wiki in the section (Automatic robot switch off) But i never test it.
Ardumower Sunray – www.wiki.ardumower.de
Not at all .But he jumps back to AREA 1. Is this normal?
Simply check the console or post it to understand what's append.
you can find your yesterday log into folder Documents/Piardumower/Log (only if you have stop mower correctly without directly unplug batteries)
Batterie Low, Rain sensor or timer can do that, or bug
