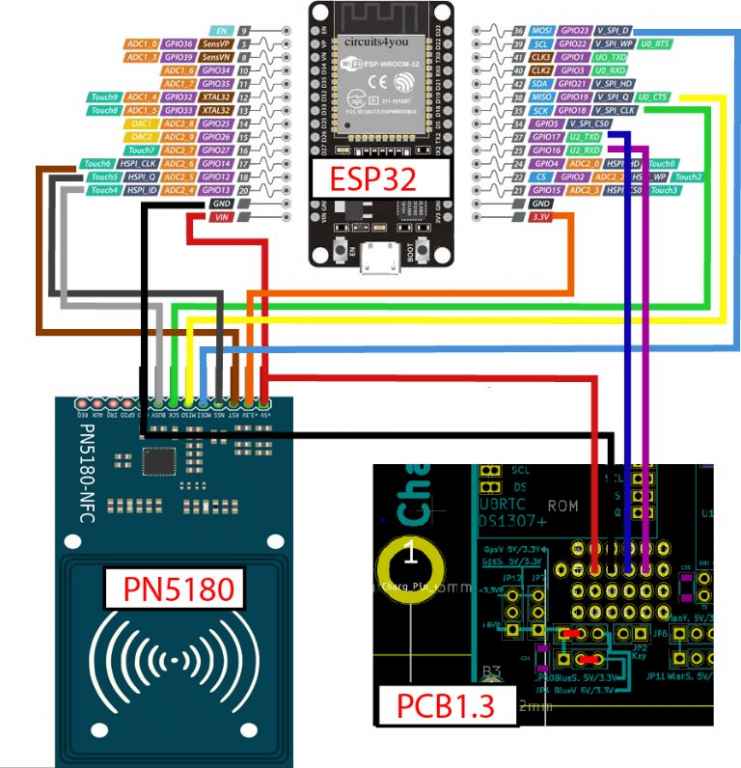
Here a solution for RFID Tag reader.
I have really test many reader and finally i use the PN5180 because (it's not 125KHZ and the reading distance is >10 CM with card)
Here the component used (sorry but unfortunatly only in china ????) replace the bbay with ebay https://www.bbay.fr/itm/10pcs-RFID-...e=STRK:MEBIDX:IT&_trksid=p2057872.m2749.l2648 https://www.bbay.fr/itm/PN5180-NFC-RF-I-Sensor-ISO15693-RFID-High-Frequency-IC-card-ICODE2-Read-Write/263259188762?hash=item3d4b786e1a:g:aZ8AAOSw7PZZ3yLq https://www.bbay.fr/itm/ESP32-ESP32...050295?hash=item3d3dd00df7:g:WiYAAOSwyrFZO5XR
https://www.bbay.fr/itm/10pcs-RFID-...e=STRK:MEBIDX:IT&_trksid=p2057872.m2749.l2648 https://www.bbay.fr/itm/PN5180-NFC-RF-I-Sensor-ISO15693-RFID-High-Frequency-IC-card-ICODE2-Read-Write/263259188762?hash=item3d4b786e1a:g:aZ8AAOSw7PZZ3yLq https://www.bbay.fr/itm/ESP32-ESP32...050295?hash=item3d3dd00df7:g:WiYAAOSwyrFZO5XR
Simply remove the HC05 Bt module from PCB1.3 and connect the ESP32 instead:
With a simple wired board:

And inside the mower.

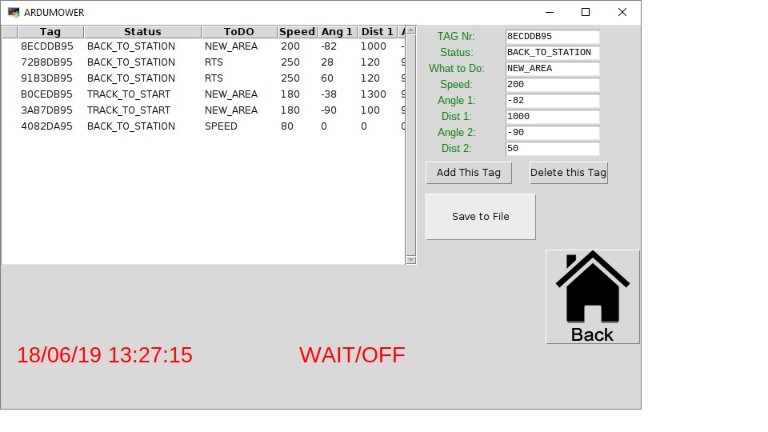
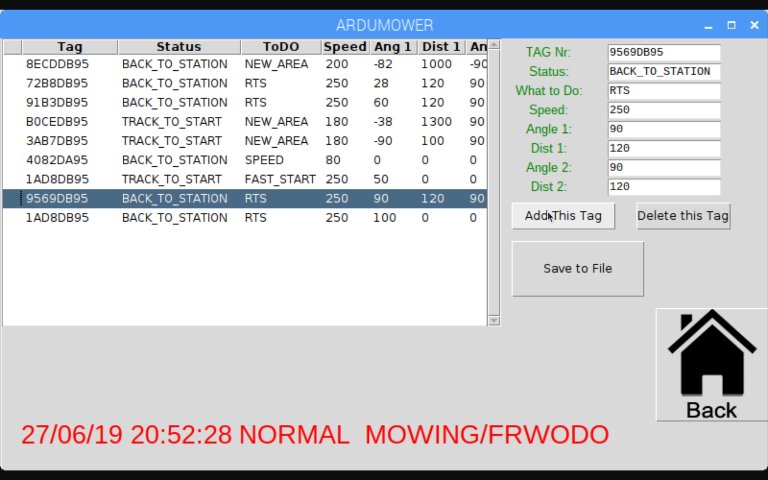
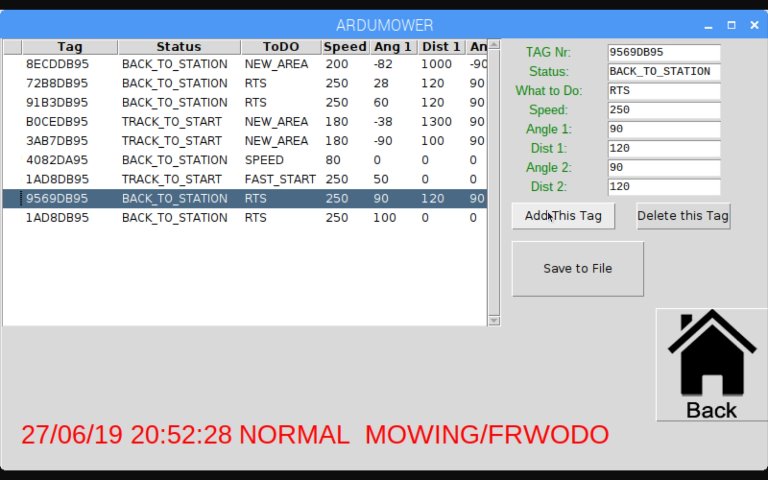
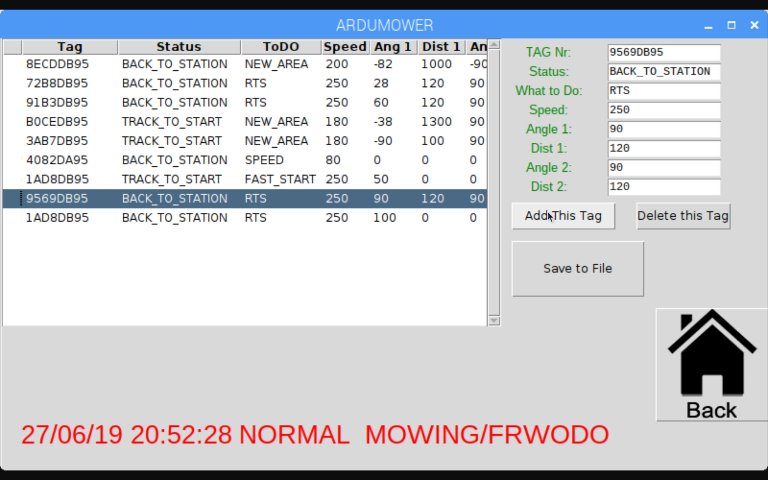
The ESP32 is now used by arduremote or Pfod and a new message is add with the tag ID find when the mower detect it.
The Azuritber send the tagID to raspberry PI and a database checking can tell the mower what to do.
Next step is to Do all the job in the DUE but it's difficult to enter the data in the DUE.
https://github.com/Boilevin/AzuritBer/tree/RFID/TEST FILE/ESP32_PFOD_PASSERELLE_OK
All work like a charm for the moment(With a PI3B+)
I have really test many reader and finally i use the PN5180 because (it's not 125KHZ and the reading distance is >10 CM with card)
Here the component used (sorry but unfortunatly only in china ????) replace the bbay with ebay
https://www.bbay.fr/itm/10pcs-RFID-...e=STRK:MEBIDX:IT&_trksid=p2057872.m2749.l2648 https://www.bbay.fr/itm/PN5180-NFC-RF-I-Sensor-ISO15693-RFID-High-Frequency-IC-card-ICODE2-Read-Write/263259188762?hash=item3d4b786e1a:g:aZ8AAOSw7PZZ3yLq https://www.bbay.fr/itm/ESP32-ESP32...050295?hash=item3d3dd00df7:g:WiYAAOSwyrFZO5XR Simply remove the HC05 Bt module from PCB1.3 and connect the ESP32 instead:
With a simple wired board:
And inside the mower.
The ESP32 is now used by arduremote or Pfod and a new message is add with the tag ID find when the mower detect it.
The Azuritber send the tagID to raspberry PI and a database checking can tell the mower what to do.
Next step is to Do all the job in the DUE but it's difficult to enter the data in the DUE.
https://github.com/Boilevin/AzuritBer/tree/RFID/TEST FILE/ESP32_PFOD_PASSERELLE_OK
All work like a charm for the moment(With a PI3B+)

{kind=link}
{kind=link}
{kind=link}
{kind=link}