Für die weitere Umsetzung meiner Software von Nucleo auf das Ardumoer PCB benötige ich nun ein Chassis. Dieses möchte ich in diesem Thread dokumentieren.
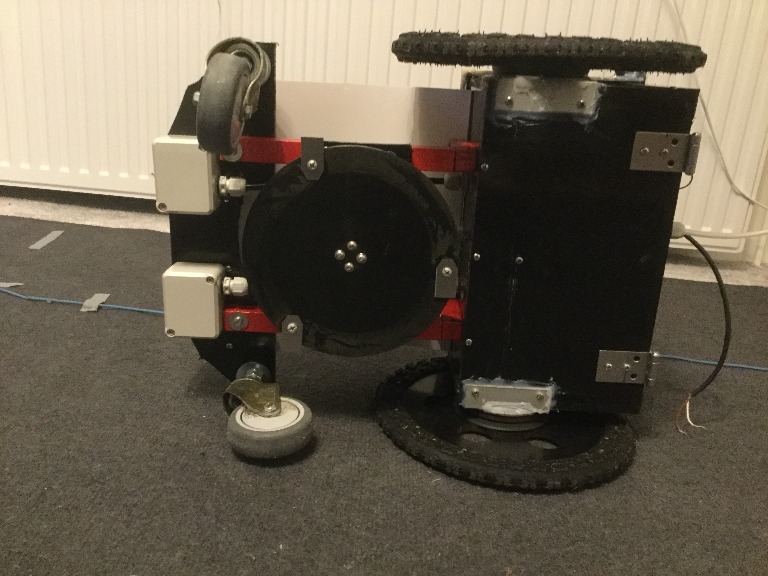
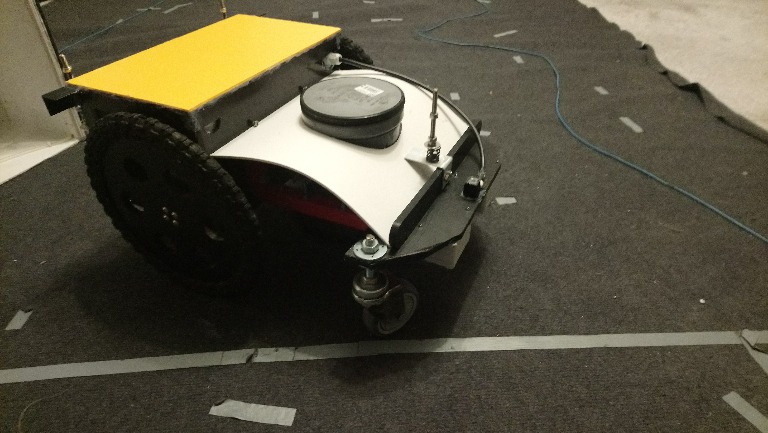
Mein Ziel ist es ja, ein Chassis zu haben, das auch bei Regen mähen kann. Da ich mein Gras ca. 7- 8cm hoch mähe, war die Form des Originalchassis für mich ungünstig, da der Mähteller zu dicht am Boden ist. Dort hat sich dann Gras um den Mähteller gesammelt und den Widerstand beim drehen erhöht.
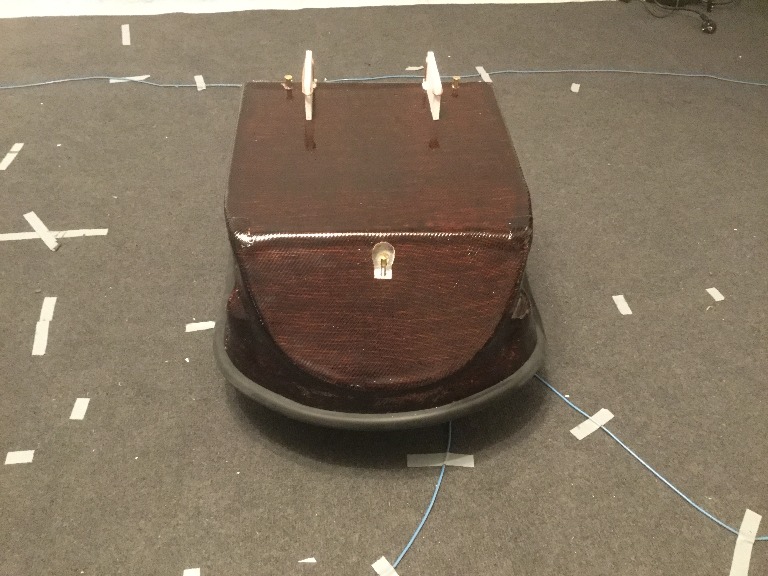
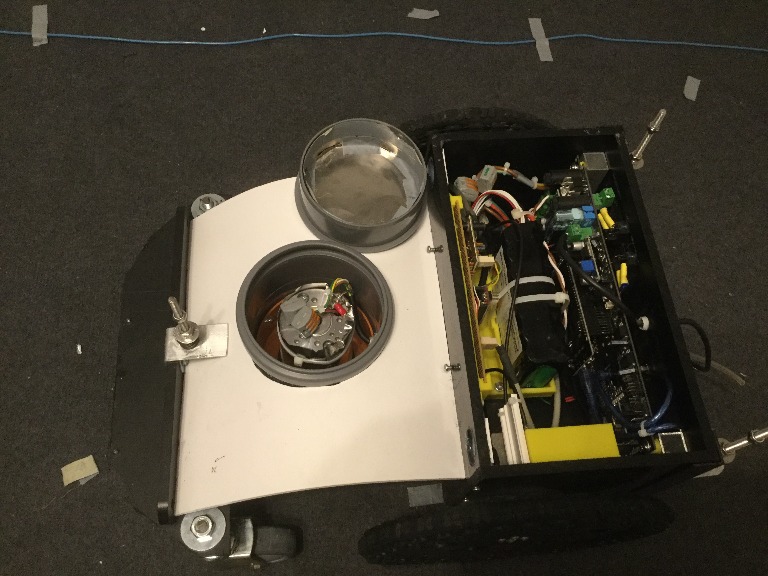
Daher habe ich nun den Mähteller nun so montiert, dass dieser nach oben hin frei ist und sich das Gras nicht mehr absetzen kann. Leider habe ich nun die großen Räder nicht mehr vorne, so dass ich nicht über meine Geoboarder fahren kann. Weiterhin kommt durch den Mähmotor nun mehr Gewicht auf die Lenkräder. Wird sich wohl erst nächstes Jahr zeigen wie sich das auf dem Rasen verhält. Die Spulen werden mit 50cm RG174 kabel an die Verstärker angeschlossen, welche sich dann im großem Gehäuse beim PCB1.3 befinden. Ich verwende dicke 24V Relay Spulen mit 1H Induktivität. Diese haben ein stärkeres Empfangssignal.
Die Spulen sitzen nun ziemlich weit von den Antriebsmotoren entfernt.
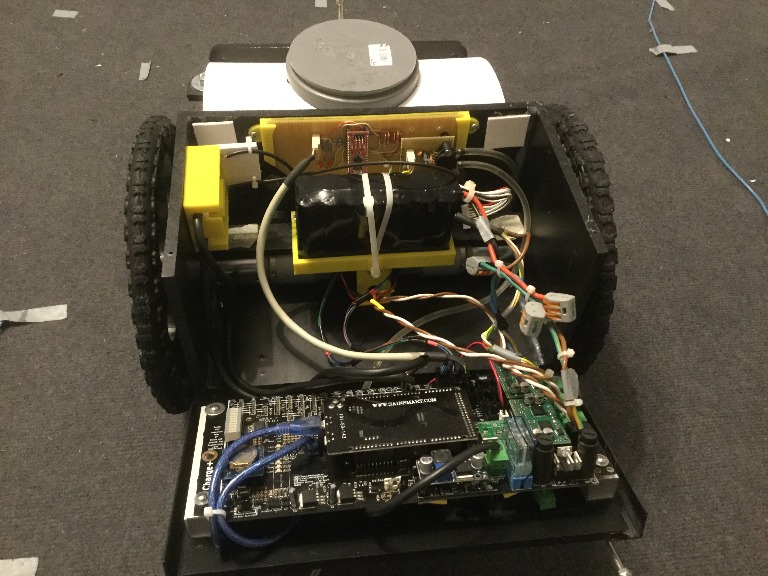
Das PCB ist hinten an einer Klappe montiert. Damit erreiche ich eine bessere serviceability.
Das wars erstmal für heute.
[attachment=4271]DSC00528.JPG[/attachment]
Mein Ziel ist es ja, ein Chassis zu haben, das auch bei Regen mähen kann. Da ich mein Gras ca. 7- 8cm hoch mähe, war die Form des Originalchassis für mich ungünstig, da der Mähteller zu dicht am Boden ist. Dort hat sich dann Gras um den Mähteller gesammelt und den Widerstand beim drehen erhöht.
Daher habe ich nun den Mähteller nun so montiert, dass dieser nach oben hin frei ist und sich das Gras nicht mehr absetzen kann. Leider habe ich nun die großen Räder nicht mehr vorne, so dass ich nicht über meine Geoboarder fahren kann. Weiterhin kommt durch den Mähmotor nun mehr Gewicht auf die Lenkräder. Wird sich wohl erst nächstes Jahr zeigen wie sich das auf dem Rasen verhält. Die Spulen werden mit 50cm RG174 kabel an die Verstärker angeschlossen, welche sich dann im großem Gehäuse beim PCB1.3 befinden. Ich verwende dicke 24V Relay Spulen mit 1H Induktivität. Diese haben ein stärkeres Empfangssignal.
Die Spulen sitzen nun ziemlich weit von den Antriebsmotoren entfernt.
Das PCB ist hinten an einer Klappe montiert. Damit erreiche ich eine bessere serviceability.
Das wars erstmal für heute.
[attachment=4271]DSC00528.JPG[/attachment]











{kind=link}
{kind=link}
{kind=link}
{kind=link}