Es hat sich herausgestellt, dass meine Vorderräder nicht richtig funktionieren. Zum einen setzt sich Rasenschnitt hinter die Kappe, zum anderen sind die Lager verrostet.
Ich teste nun mal zwei andere Varianten. Einmal eine Rolle mit Gleitlager und einmal die defekte Rolle, aber hier habe ich die Lager gegen Wasserdichte ausgetauscht und die Nabe etwas dichter gemacht, so dass da kaum ein Spalt ist.
Grundsätzlich bin ich aber der Meinung, dass diese Art der Radaufhängung schlecht ist. Besser ist die mit nur einem Stahlbügel anstatt wie hier mit zwei senkrechten Haltern. In diesen Haltern sammelt sich das Schnittgut, gerade wenn es feucht ist und bremst das Rad.
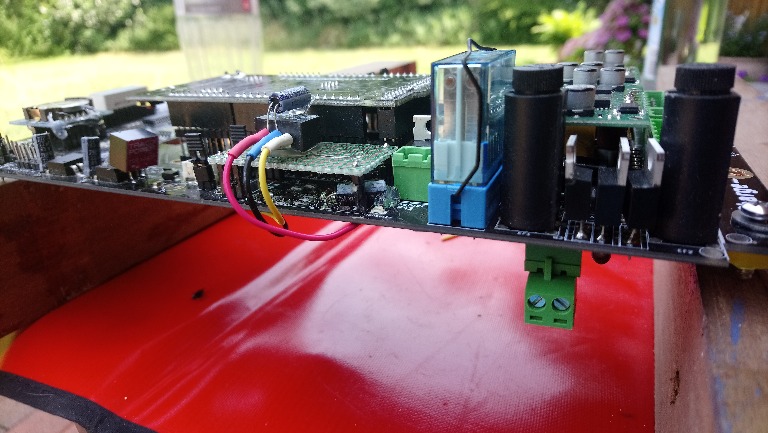
Aktuell habe ich einen Boden zum Testen untergebaut, damit das Gras nicht an die Spulen fliegt. Man sieht hier auch wieder sehr schön, wie das Gras sich um die Scheibe sammelt. Obwohl die Unterseite der Scheibe hier nun ca. 2cm entfernt ist vom Boden. Da werde ich wohl noch bisschen umbauen müssen






Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2936/DSC_0517.JPG/
Ich teste nun mal zwei andere Varianten. Einmal eine Rolle mit Gleitlager und einmal die defekte Rolle, aber hier habe ich die Lager gegen Wasserdichte ausgetauscht und die Nabe etwas dichter gemacht, so dass da kaum ein Spalt ist.
Grundsätzlich bin ich aber der Meinung, dass diese Art der Radaufhängung schlecht ist. Besser ist die mit nur einem Stahlbügel anstatt wie hier mit zwei senkrechten Haltern. In diesen Haltern sammelt sich das Schnittgut, gerade wenn es feucht ist und bremst das Rad.
Aktuell habe ich einen Boden zum Testen untergebaut, damit das Gras nicht an die Spulen fliegt. Man sieht hier auch wieder sehr schön, wie das Gras sich um die Scheibe sammelt. Obwohl die Unterseite der Scheibe hier nun ca. 2cm entfernt ist vom Boden. Da werde ich wohl noch bisschen umbauen müssen
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2936/DSC_0517.JPG/
Zuletzt bearbeitet von einem Moderator:























") Allerdings muss man erstmal das konzept dahinter verstehen.
Allerdings muss man erstmal das konzept dahinter verstehen.{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}