So eben mal kurze Testfahrt gemacht... bei leichtem Regen und nassem 4-5cm zu hohem Rasen.
Hatte da nicht viel erwartet aber ist das ein KRASSER Unterschied!

Bin in der Vergangenheit nie über Speed 0,25 gegangen weil er sonst immer aus der Bahn gehüpft ist und gerne mal 5-10cm breite Irokesen auf einigen Metern länge bei den langen Bahnen stehen hat lassen. Mit den neuen Rädern sieht das Ergebnis bei 0,37 Speed jetzt so aus, nahzu perfekt gerade Linien! ...und das bei so langem Graß dass er da bei 1,6-1,8A Dauerbetrieb am durch hacken war. Wollte daher nicht höher gehen mit dem Speed, der Mäher war echt schon am leiden eben, aber denke da geht noch mehr wenn es trocken ist und Graß normale Länge.
Dachte immer es liegt vor allem an den JYQD Treibern und dem GPS dass er so ungenau ist bei höherem Speed, aber scheinbar war der Hauptverantwortliche bei meinem bucklischem Rasen einfach die viel zu schmalen Reifen.
Ja die Reifen sauen übel ein.... aber das war jetzt auch Worst Case Szenario gewesen, wenn der Roboter unten drunter so aussieht nach nur 15min, dann hab ich wenig Probleme damit kurz per Hand auch die Reifen sauber zu machen nach getaner Arbeit.

Mal sehen wie sich das im Normalbetrieb entwickelt, für unten drunter muss ich mir eh noch was einfallen lassen, da brauche ich auch noch 3D Druck Teile die unten zu machen damit das Mulschen wieder etwas besser wird.
Mit dem Speed gehen gerade die langen 50m+ Bahnen jedenfalls absurd schnell, die komplette Fläche auf dem Bild mal eben in 15min gemacht.
Gesamtzeit von 7,7h auf 6,2h runter gegangen laut App damit.
Die Tage wenn es trocken ist mal Hill Climbing damit testen... vorher muss ich aber noch Schrauben finden, aktuell nur zwei passende Schrauben pro Rad gefunden, die originalen sind zu kurz.
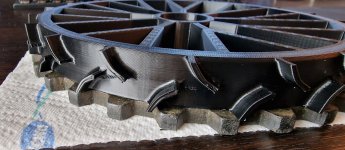
Jetzt wo das Ergebnis so gut ist werde ich da denke nochmal etwas mehr rum experimentieren, eventuell doch noch 1-2cm mehr Breite auf die Schlappen und eventuell rechts und links neben das V dann noch anderes Profil als Ergänzung.