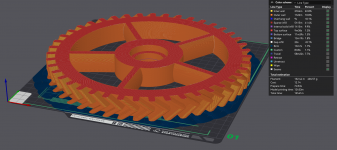
So die erste Design Idee ist soweit fertig gestellt... war dann doch deutlich simpler als Gedacht, daher von Grund auf neu gebaut.
Hab mich da einfach mal von random Auto Felgen inspirieren lassen, so viele Streben sind zwar denke zur Stabilität nicht nötig, aber wollte keine Großen Zwischenräume wo sich was verfangen kann.
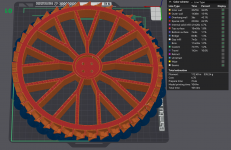
Mit "nur" 335g Gewicht sogar deutlich leichter als ich gedacht hatte und das ist schon die Krawall Version im Slicer mit 30% Infill, 4 Wallloops und 5 Buttom/Top Layers. Das V Profil ist dabei quasi zu 100% aus massives Material.
Die Radaufnahme hatte ich bezüglich Stabilität mal mit PETG gedruckt... mit dem Teil kann man gefühlt Scheiben einwerfen, denke das sollte ganz gut halten.
Profil hab ich eben auch mal ein kleines Stück durch den Drucker gehauen um das mal in Echt zu betrachten.... Stabilität ist Top!
Mal richtig dran gedrückt eben, keine Chance die mal eben abzubrechen, denke mal damit sollte der Roboter keine Probleme haben.
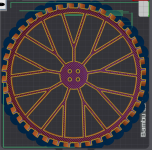
Bei den Abständen/Häufigkeit bin ich mir noch unsicher, das waren glaube doch deutlich zu viele.
Ich vermute mal der Grip dürfte sogar mit weniger Profil besser sein weil dann mehr Gewicht pro Rille auf den Reifen liegt.
Werde das denke mal halbieren damit wir grob da raus kommen wo auch die Original Reifen sind.
Rad Dicke sind 25mm erstmal gegenüber den 8mm des Originals... wobei ich da durchaus auch noch überlege auf 30mm hochzugehen nachdem das Gewicht doch leichter ist als gedacht.