Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
AzuritBER - Einrichtung und Betrieb
- Ersteller SefanH
- Erstellt am
I had at the beginning some trouble with RTC error and solved this issue with a new battery of the clock. The IMU problems I had where handmade by my self.
Later on I got problems with the odometrie and solved this problem with the replacement of the drive motors. (l/H drive motor had an intermittend odo signal problem.)
I never had an issue with the IMU after the relocation from the front to the center of the mower. There is no ferrit core installed and the cable is min. 20cm long (but shielded). The IMU is installed directly at the mower motor (stock motor) very close to the X-Y axis. It is connected to the 12C2 (IMU Compass).
Maybe it makes sense to replace the IMU one more time?
UWE
Later on I got problems with the odometrie and solved this problem with the replacement of the drive motors. (l/H drive motor had an intermittend odo signal problem.)
I never had an issue with the IMU after the relocation from the front to the center of the mower. There is no ferrit core installed and the cable is min. 20cm long (but shielded). The IMU is installed directly at the mower motor (stock motor) very close to the X-Y axis. It is connected to the 12C2 (IMU Compass).
Maybe it makes sense to replace the IMU one more time?
UWE
Anhänge

Hallo,
die mist IMU Errors machen mich noch wahnsinnig.
Der Mäher ist jetzt so ca. 1 Stunde perfekt gefahren, Bahnen schön parralel alles wie man sich vorstellt.
Dann wieder IMU-Comm Error und RTC-Data Error.
Habe den Mäher ausgeschaltet und wieder neu gebootet.
Jetzt hat er auf einmal eine Mega drift. Nach geschätzt 20 Bahnen etwa 35 Grad gedreht.
Dann nochmal ausgeschaltet und wieder neu gebootet.
Daraufhin wieder perfekte Bahnen ohne offensichtölich sichtbare drift.
Hat noch jemand solch ein Problem?
Ich habe mittlerweile so ziemlich alles mal gewechselt, von der Imu, über Mähmotor, Kabel gekürzt, i2c port gewechsel, etc.
Mir fällt so langsam nix mehr ein.
Und dann gibts da dann auch Tage da fährt er die Akkuladung leer ohne einen Error.
Gruss Michael
die mist IMU Errors machen mich noch wahnsinnig.
Der Mäher ist jetzt so ca. 1 Stunde perfekt gefahren, Bahnen schön parralel alles wie man sich vorstellt.
Dann wieder IMU-Comm Error und RTC-Data Error.
Habe den Mäher ausgeschaltet und wieder neu gebootet.
Jetzt hat er auf einmal eine Mega drift. Nach geschätzt 20 Bahnen etwa 35 Grad gedreht.
Dann nochmal ausgeschaltet und wieder neu gebootet.
Daraufhin wieder perfekte Bahnen ohne offensichtölich sichtbare drift.
Hat noch jemand solch ein Problem?
Ich habe mittlerweile so ziemlich alles mal gewechselt, von der Imu, über Mähmotor, Kabel gekürzt, i2c port gewechsel, etc.
Mir fällt so langsam nix mehr ein.
Und dann gibts da dann auch Tage da fährt er die Akkuladung leer ohne einen Error.
Gruss Michael
Hi Uwe,I had at the beginning some trouble with RTC error and solved this issue with a new battery of the clock. The IMU problems I had where handmade by my self.
Later on I got problems with the odometrie and solved this problem with the replacement of the drive motors. (l/H drive motor had an intermittend odo signal problem.)
I never had an issue with the IMU after the relocation from the front to the center of the mower. There is no ferrit core installed and the cable is min. 20cm long (but shielded). The IMU is installed directly at the mower motor (stock motor) very close to the X-Y axis. It is connected to the 12C2 (IMU Compass).
Maybe it makes sense to replace the IMU one more time?
UWE
hast du die IMU bei dir auf dem Boden befestigt?
Ich habe meine in der nähe des Deckels, also fast in der Ebene auf der die Motorkohlen des Mähmotors liegen.
vlt. kommen meine Errors daher?
Ich versuch mal die Platine niedriger.
Ja, ist mit einem doppelseitigen Klebeband neben den Mähmotor auf den Boden geklebt.
Ich hatte anfangs Schwierigkeiten eine gerade Bahn hinzubekommen.
Meine bisherigen Positionen der IMU waren vorne, in der Nähe des Stützrades, auf dem DUE (schlechteste Ergebnis) auf dem Mowmotor und jetzt hinten.
Es gibt auch bei mir einige wenige Tage an dem der Mower in den ersten 30min nicht parallel fährt. Dann funktioniert es aber. Damit kann ich leben.
Uwe
Ich hatte anfangs Schwierigkeiten eine gerade Bahn hinzubekommen.
Meine bisherigen Positionen der IMU waren vorne, in der Nähe des Stützrades, auf dem DUE (schlechteste Ergebnis) auf dem Mowmotor und jetzt hinten.
Es gibt auch bei mir einige wenige Tage an dem der Mower in den ersten 30min nicht parallel fährt. Dann funktioniert es aber. Damit kann ich leben.
Uwe
@michelko
When mower don't drive straight it's certainly because the IMU is deactivate.
You can check this into setting IMU (YES or NO) or into error menu (IMU COMM)
Firmware automaticaly deactivate IMU if I2C reading take more than 30 ms and mower continue to run using odometry
When you reboot IMU is activate again.
In all case i have the same issue in my side inside my new dev tianchen TC-G158 (china motor make so many electrical noise that Perimeter reading is not OK and IMU crash each time i start the 2 mow motor).
The last DEV branch use a new PWM frequency and it solve the perimeter reading issue but not the IMU one.
Here some scope to understand:
Perimeter receiver with mow motor OFF:

Perimeter receiver with mow motor ON:

As you can see the signal detection is more complex when motor is ON.
Now the PWM motor frequency effect:
Red signal is the receiver and blue the mow PWM signal.
when mow motor and signal are off the red signal is flat at 2.5V and blue flat at 0V and it's OK.
Now i test with signal OFF and PWM motor at 3900 hertz :

The red signal show the noise with a peak to peak voltage near 1.522V
Now if i test with signal OFF and PWM motor at 20000 hertz (the max that my L298N driver can work)

As you can see the noise is divide by 2 and only 0.671 V but always present.
When i have time i need to test to put a mow motor from Robomow inside the chassis ,but i am pretty sure that it solve all the problem because there is EMF protection inside the motor.
TEST WITH a different high in the chassis can be a good idea.
When mower don't drive straight it's certainly because the IMU is deactivate.
You can check this into setting IMU (YES or NO) or into error menu (IMU COMM)
Firmware automaticaly deactivate IMU if I2C reading take more than 30 ms and mower continue to run using odometry
When you reboot IMU is activate again.
In all case i have the same issue in my side inside my new dev tianchen TC-G158 (china motor make so many electrical noise that Perimeter reading is not OK and IMU crash each time i start the 2 mow motor).
The last DEV branch use a new PWM frequency and it solve the perimeter reading issue but not the IMU one.
Here some scope to understand:
Perimeter receiver with mow motor OFF:
Perimeter receiver with mow motor ON:
As you can see the signal detection is more complex when motor is ON.
Now the PWM motor frequency effect:
Red signal is the receiver and blue the mow PWM signal.
when mow motor and signal are off the red signal is flat at 2.5V and blue flat at 0V and it's OK.
Now i test with signal OFF and PWM motor at 3900 hertz :
The red signal show the noise with a peak to peak voltage near 1.522V
Now if i test with signal OFF and PWM motor at 20000 hertz (the max that my L298N driver can work)
As you can see the noise is divide by 2 and only 0.671 V but always present.
When i have time i need to test to put a mow motor from Robomow inside the chassis ,but i am pretty sure that it solve all the problem because there is EMF protection inside the motor.
TEST WITH a different high in the chassis can be a good idea.
@michelko
When mower don't drive straight it's certainly because the IMU is deactivate.
You can check this into setting IMU (YES or NO) or into error menu (IMU COMM)
Firmware automaticaly deactivate IMU if I2C reading take more than 30 ms and mower continue to run using odometry
When you reboot IMU is activate again.
I can not see this.
The mower stops complete in Error state and shows IMU Com error and RTC Data error.
I have reboot it to get it running again.
Michael
I need to work on code a try to make it compatible with GY-801 IMU maybe more stable over noise but not so accurate than MPU6050.
I never see motor from shop and certainly it's not EMF protected.
Here brush noise suppression on RL2000 motor: capacitor is between brush and motor box.

On the net you can find many info on GY-521 emf DC motor noise
 www.fpaynter.com
www.fpaynter.com
In your case and I have the same issue on tianchen platform and can't solve it except by using other mow motor.
Motor noise crash totaly the I2C GY-521 line.
IMU COM and RTC error is I2C error communication and i hope never occur if you disconnect the mow motor
Again test with the mow motor OFF for 2 or 3 days and if there is no error ,you need to try the workarround on the mow motor using capacitor.
Without noise soft is stable for unlimited duration .Here a screen copy of 22 days in full auto mode without any crash or reboot

I never see motor from shop and certainly it's not EMF protected.
Here brush noise suppression on RL2000 motor: capacitor is between brush and motor box.
On the net you can find many info on GY-521 emf DC motor noise
MPU6050 IMU Motor Noise Troubleshooting | Paynter's Palace
www.fpaynter.com
In your case and I have the same issue on tianchen platform and can't solve it except by using other mow motor.
Motor noise crash totaly the I2C GY-521 line.
IMU COM and RTC error is I2C error communication and i hope never occur if you disconnect the mow motor
Again test with the mow motor OFF for 2 or 3 days and if there is no error ,you need to try the workarround on the mow motor using capacitor.
Without noise soft is stable for unlimited duration .Here a screen copy of 22 days in full auto mode without any crash or reboot



Do you have a GY-801 IMU ?Hab jetzt diverse i2c ports probiert, andere imu platine,sowie die oben beschriebene pwm änderung auf 10000.
Heute wieder dreimal imu com error.
Ich bekomme die Tage so einen klappferit. Ds ist echt meine letzte Hoffnung.
SefanH
Active member
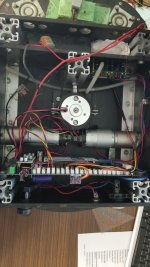
Mach doch mal Fotos von deinem Aufbau und der Kabelführung.Hab jetzt diverse i2c ports probiert, andere imu platine,sowie die oben beschriebene pwm änderung auf 10000.
Heute wieder dreimal imu com error.
Ich bekomme die Tage so einen klappferit. Ds ist echt meine letzte Hoffnung.
I use a gy521 mpu6050 imuDo you have a GY-801 IMU ?

Also ich hab nun in der piman.cpp die pwm frequenz von 3600 auf 10000 gestellt sowie Bernard oben geschrieben hat.
Pwm min habe ich schon von 180 bis 250 alles durchprobiert. Momentan steht er gaube ich auf 230
Ist ja auch das Standard chassis, meiner fährt nur anders herum. Ich habe vorne zwei kleine Räder und den Antrieb hinten.
Gruss
Pwm min habe ich schon von 180 bis 250 alles durchprobiert. Momentan steht er gaube ich auf 230
Ist ja auch das Standard chassis, meiner fährt nur anders herum. Ich habe vorne zwei kleine Räder und den Antrieb hinten.
Gruss
SefanH
Active member
Klingt komisch! Warum der Fehler?
Bernard hatte schon einige Defekte Module. Vielleicht nochmal ein neues besorgen?
Lass mal die Console mitlaufen... Vielleicht sieht man ja den Fehler?
Wenn der Mäher nicht parallel fährt kannst du mal unter Settings, IMU gucken ob der noch aktiv ist oder auf deaktiviert steht.
Bernard hatte schon einige Defekte Module. Vielleicht nochmal ein neues besorgen?
You need also to take care with GY-521 .
I order 5 module on ebay and 2 of them never work !!!!!!
Lass mal die Console mitlaufen... Vielleicht sieht man ja den Fehler?
Wenn der Mäher nicht parallel fährt kannst du mal unter Settings, IMU gucken ob der noch aktiv ist oder auf deaktiviert steht.
If you search on google for:
GY-521 motor noise (many post)
And :
GY-801 motor noise. (no post)
You can understand the trouble with GY-521 low cost module and low cost DC motor emf.
If some people can test the GY-801 into AZURITBER i can try to write the code to have it working .But i don't know the accuracy !
My test show the same noise trouble with GY-88,GY-87 and MPU-9255
GY-521 motor noise (many post)
And :
GY-801 motor noise. (no post)
You can understand the trouble with GY-521 low cost module and low cost DC motor emf.
If some people can test the GY-801 into AZURITBER i can try to write the code to have it working .But i don't know the accuracy !
My test show the same noise trouble with GY-88,GY-87 and MPU-9255