Because my garden isn't flat, was necessary start implementing improvements which I planned for new mower version 2018 (working name "Black pearl" ") ).
).
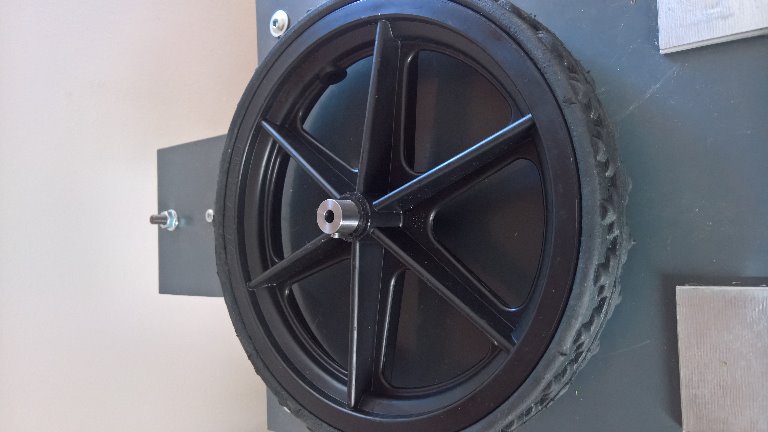
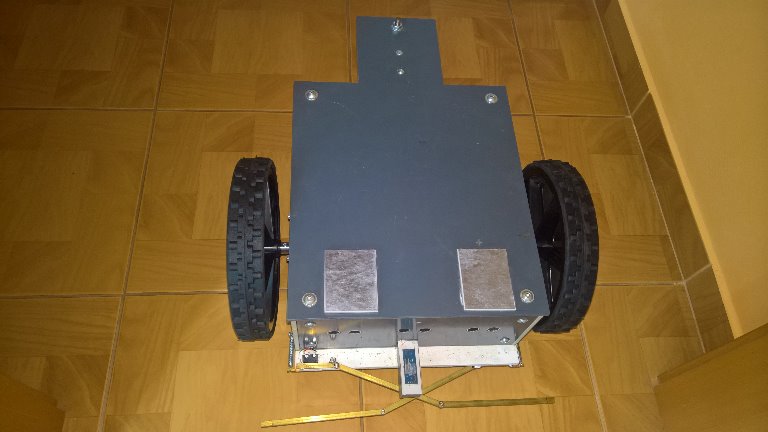
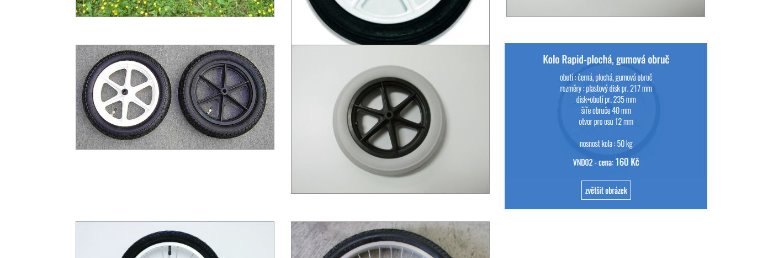
First is wheels change, because original plastic was good for flat garden, but on my garden sometimes wheels slip. So I bought new one. Price for both was 15Euro.
Also weight isn't so bad (0,75kg / one Wheel ).
Alex
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/1183/WP_20170610_08_50_41_Rich.jpg/
).First is wheels change, because original plastic was good for flat garden, but on my garden sometimes wheels slip. So I bought new one. Price for both was 15Euro.
Also weight isn't so bad (0,75kg / one Wheel ).
Alex
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/1183/WP_20170610_08_50_41_Rich.jpg/
Zuletzt bearbeitet von einem Moderator:



{kind=link}
{kind=link}
{kind=link}