Hi,
Let me show you my mower project. Starting point is here running project, but I did some modifications. Hope that this thema will help share informations for beginners like I am.
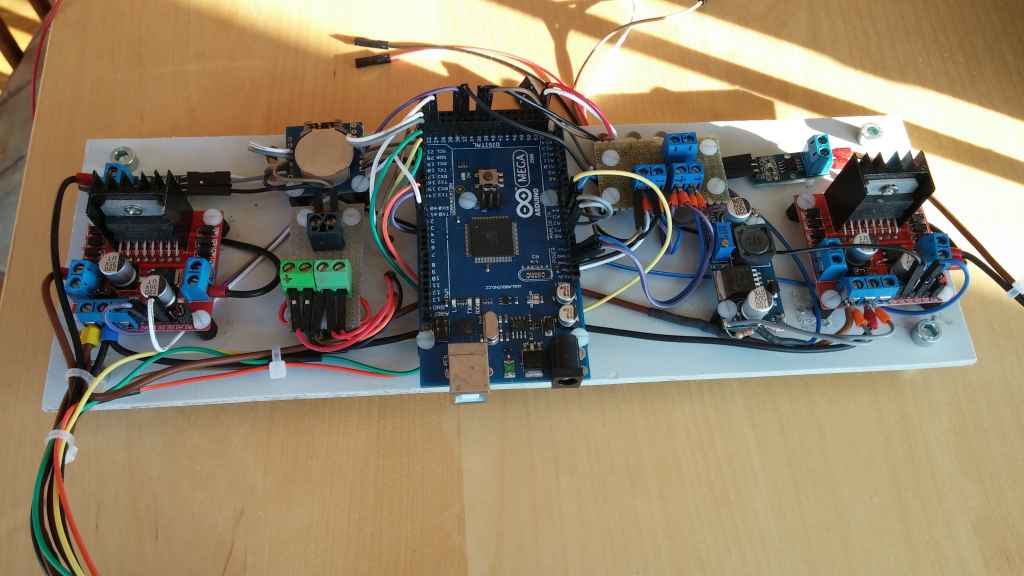
First version which I made :
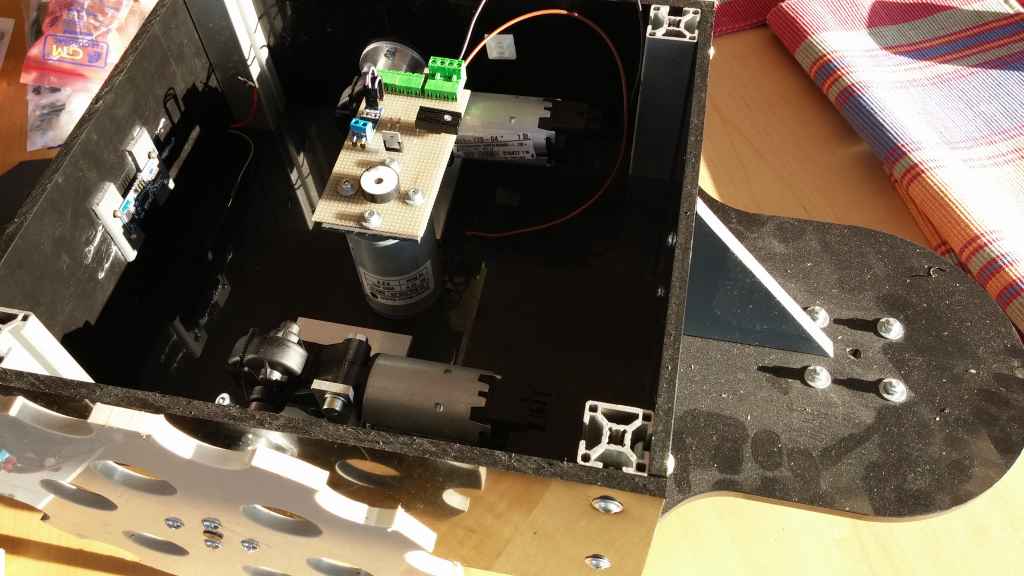
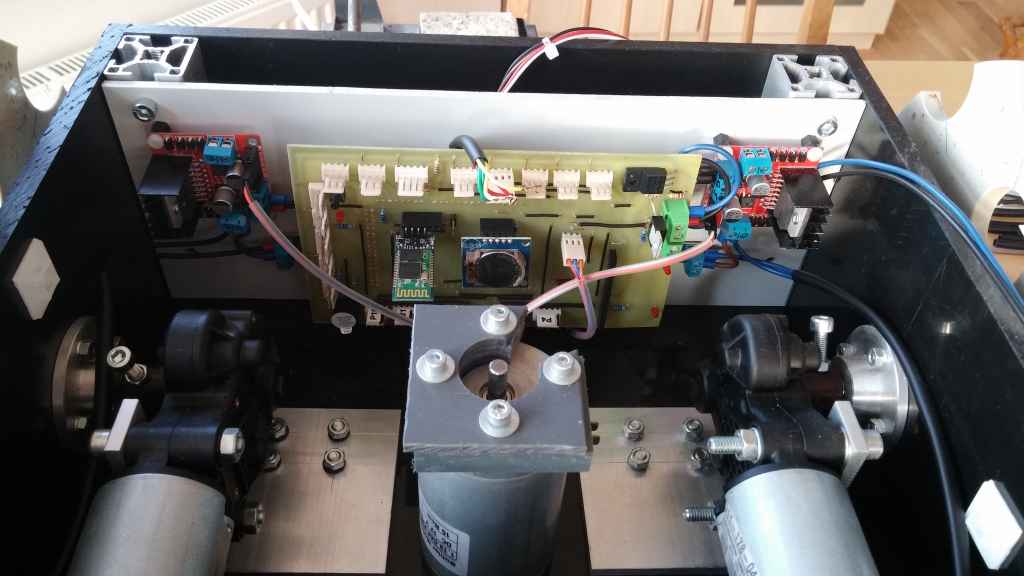
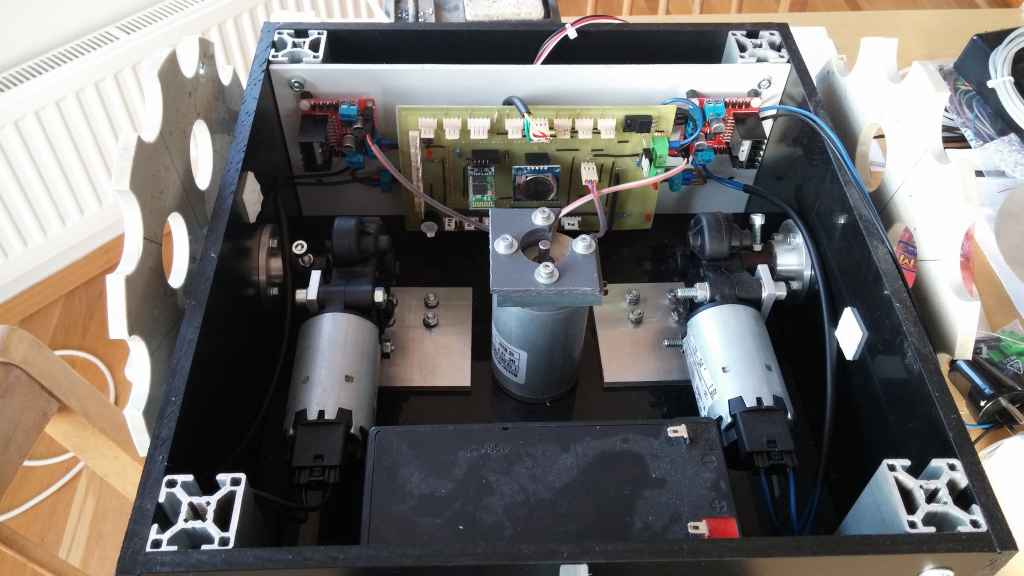
Finished was chassis - my modification is, that back wheel is part of bottom desk and not upper
Front bumper was in development together with perimenter sender/receiver and lawn sensor.



Alex
Let me show you my mower project. Starting point is here running project, but I did some modifications. Hope that this thema will help share informations for beginners like I am.
First version which I made :
Finished was chassis - my modification is, that back wheel is part of bottom desk and not upper
Front bumper was in development together with perimenter sender/receiver and lawn sensor.
Alex








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}