Hallo,
ich habe bei Ebay einen defekten Worx WG797E.1 günstig ersteigert und möchte diesen auf die PCB1.3 umbauen und dabei möglichst alle Sensoren und Motoren behalten und nutzen,
Jetzt habe ich hier schon ein wenig gelesen und gesehen, dass es hier im Forum schon jemand gibt, der einen Worx umgebaut hat. Also habe ich ihn angeschrieben, per PN, was im Nachhinein gesehen nicht so gut war, da der Umbau bestimmt auch andere interessieren könnte.
Deshalb habe ich hier mal ein paar Auszüge als Zitat eingefügt, bevor ich hier weiter meine Fragen stelle oder auch meine Erfahrungen mit dem Umbau beschreibe.
Ich habe Aiko gefragt, wie er beim Umbau vorgegangen ist und ob er dies irgendwo aufgeschrieben hat.
Seine Antwort:
Ich will dann hier mal weiter Antworten und hoffe auch, dass es noch andere gibt, die mir hier weiter helfen können. Aber um die Frage zu beantworten und um mich ein wenig vorzustellen, Ich bin Andre aus Berlin Pankow und bin ausgebildeter Energieanlagenelektroniker, wobei ich in den letzten 20 Jahren mehr als Programmierer gearbeitet habe. Und ich denke hier werden auch meine Stärken für diese Projekt liegen. Die letzten 10 Jahre habe ich an einer Opensource Software zum Geocachen gearbeitet. Habe also Erfahrungen mit Opensource, Git, Java und Android.
In die Hardware muss ich mich wohl noch einarbeiten, aber man lernt nie aus.
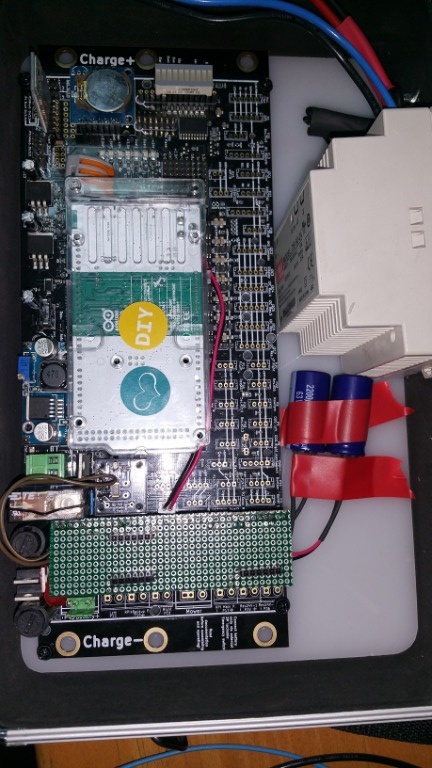
Ich habe mir die PCB1.3 bestellt und bin hier auch schon am Bestücken und neben bei am Recherchieren, wie ich die Motoren Ansteuere.
Leider sind auf meinen Motoren keinerlei Aufkleber zum Typ zu Finden.
Und ich hatte eigentlich gehofft, dass alle drei Motoren Brushless-Motoren mit Hallsensoren sind, da alle drei gleich angeschlossen sind.
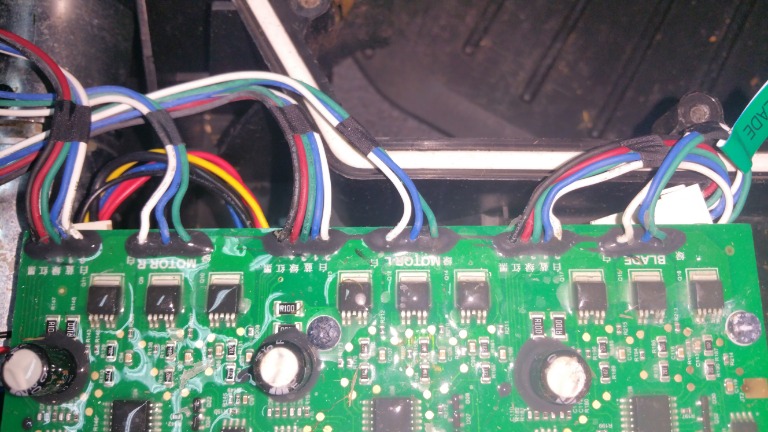
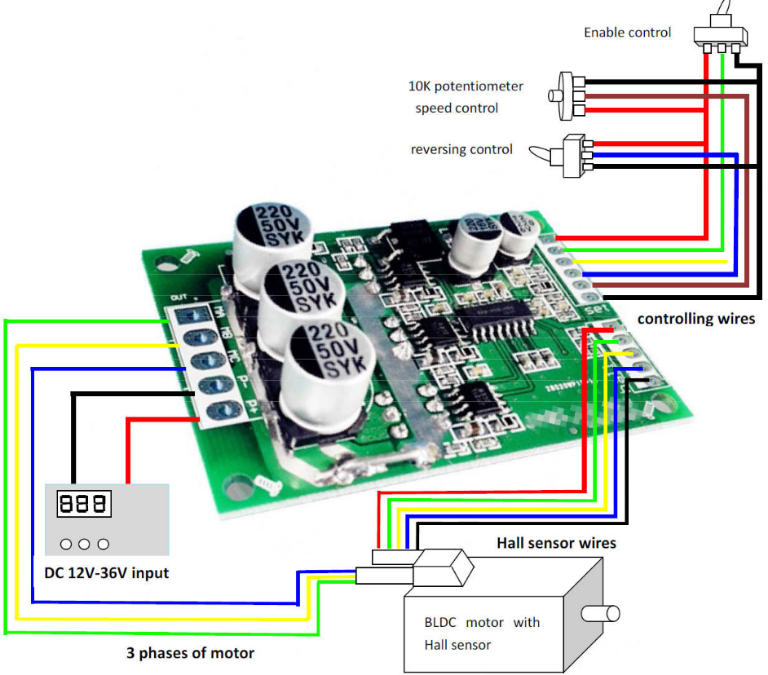
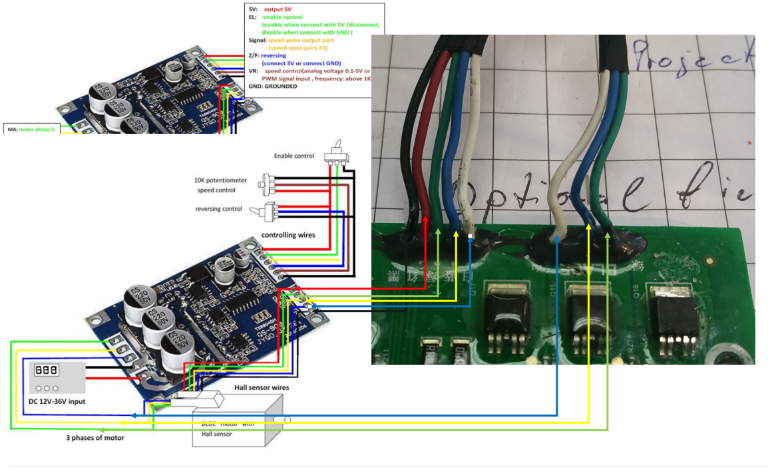
Weshalb ich mir auch drei Treiber Platinen bestellt habe. Die laut Beschreibung so angeschlossen werden. Ich würde jetzt denken, dass ich im ersten Schritt die Motoren genauso anschließen würde, um zu sehen, ob diese sich drehen.
Wie ich den PWM Ausgang dann auf die 0V-5V, die vom Poti kommen, würde ich mich dann später kümmern.
Was ich jetzt nicht verstehe, sind die Unterschiede in den, von Aiko beschriebenen Motor Typen.
Also zwischen dem Mähmotor (AC-Duncker-Motor) und den Antrieben (3-Phasen-Brushless-Motoren)
Sind das unterschiedliche Motor-Typen, die gleich angeschlossen werden aber unterschiedlich funktionieren? Mal abgesehen von der Baugröße und das der Mähmotor kein Getriebe hat.
Schöne Grüße aus Berlin
Andre
ich habe bei Ebay einen defekten Worx WG797E.1 günstig ersteigert und möchte diesen auf die PCB1.3 umbauen und dabei möglichst alle Sensoren und Motoren behalten und nutzen,
Jetzt habe ich hier schon ein wenig gelesen und gesehen, dass es hier im Forum schon jemand gibt, der einen Worx umgebaut hat. Also habe ich ihn angeschrieben, per PN, was im Nachhinein gesehen nicht so gut war, da der Umbau bestimmt auch andere interessieren könnte.
Deshalb habe ich hier mal ein paar Auszüge als Zitat eingefügt, bevor ich hier weiter meine Fragen stelle oder auch meine Erfahrungen mit dem Umbau beschreibe.
Ich habe Aiko gefragt, wie er beim Umbau vorgegangen ist und ob er dies irgendwo aufgeschrieben hat.
Seine Antwort:
Hi Andre,
Sorry, daß es so lange gedauert hat. Ich bin schon eine ganze Weile nicht mehr im Forum aktiv gewesen. Bin erst durch eine Mail von Markus auf Deine PM aufmerksam gemacht worden.
Puh, was soll ich sagen? Bin auch schon eine Weile wieder raus aus dem Thema, aber ich habe mal durch meine Posts geschaut...
https://www.ardumower.de/index.php/de/forum/antrieb/73-moegliche-antriebsmotoren?start=20#6534
Hier hatte ich mal kurz beschrieben, was ich gemacht habe. Das ist aber von einer "Doku" weit entfernt. Ich habe seinerzeit alles auf einem Breadboard zusammen gesteckt und entwickelt und letztlich auf einer Laborplatine übernommen. (ähnlich solch einer: https://www.reichelt.de/mikroprozessor-laborkarte-hartpapier-160x100mm-up-932hp-p23968.html )
Mit einer fertigen Platine wie im Ardumower-Kit ist das lange nicht vergleichbar. Die gab es da noch nicht. Mein Wunsch war es immer, die Treiber-Elektronik mal auszulagern und über die original Ardumower-Platine einsetzen zu können.
Die Schwierigkeit an den Landroid Motoren ist, daß es sich bei den Fahrmotoren um 3-Phasen-Brushless-Motoren von ebmPabst handelt, die nicht einfach über einen fertigen Motortreiber, wie den mc33926, ansteuerbar sind. Schau Dir mal in meinem Post das Datenblatt zum L6235 Seite 26 an. Das ist mit ein paar Abweichungen so ähnlich umgesetzt.
Der Mähmotor ist ein AC-Duncker-Motor, der also abhängig von der Phasenlage (über Hallsensoren) mit Wechselspannung angesteuert werden muss.
Dafür habe ich mir eine Ansteuer-Logik ausgedacht, die auch bis heute problemlos läuft.
Fakt ist aber, daß die Original-Motoren sehr hochwertig sind, was auch meine Motivation, diese zum Laufen zu bringen, sehr beflügelt hatte!
Wie ist denn Dein Kenntnisstand bezüglich Elektronik, Schaltungstechnik, Löten etc.? Wärst Du in der Lage so etwas zu bauen, was über das simple Bestücken einer fertigen Platine hinaus geht?
Gruß
Aiko
Ich will dann hier mal weiter Antworten und hoffe auch, dass es noch andere gibt, die mir hier weiter helfen können. Aber um die Frage zu beantworten und um mich ein wenig vorzustellen, Ich bin Andre aus Berlin Pankow und bin ausgebildeter Energieanlagenelektroniker, wobei ich in den letzten 20 Jahren mehr als Programmierer gearbeitet habe. Und ich denke hier werden auch meine Stärken für diese Projekt liegen. Die letzten 10 Jahre habe ich an einer Opensource Software zum Geocachen gearbeitet. Habe also Erfahrungen mit Opensource, Git, Java und Android.
In die Hardware muss ich mich wohl noch einarbeiten, aber man lernt nie aus.
Ich habe mir die PCB1.3 bestellt und bin hier auch schon am Bestücken und neben bei am Recherchieren, wie ich die Motoren Ansteuere.
Leider sind auf meinen Motoren keinerlei Aufkleber zum Typ zu Finden.
Und ich hatte eigentlich gehofft, dass alle drei Motoren Brushless-Motoren mit Hallsensoren sind, da alle drei gleich angeschlossen sind.
Weshalb ich mir auch drei Treiber Platinen bestellt habe. Die laut Beschreibung so angeschlossen werden. Ich würde jetzt denken, dass ich im ersten Schritt die Motoren genauso anschließen würde, um zu sehen, ob diese sich drehen.
Wie ich den PWM Ausgang dann auf die 0V-5V, die vom Poti kommen, würde ich mich dann später kümmern.
Was ich jetzt nicht verstehe, sind die Unterschiede in den, von Aiko beschriebenen Motor Typen.
Also zwischen dem Mähmotor (AC-Duncker-Motor) und den Antrieben (3-Phasen-Brushless-Motoren)
Sind das unterschiedliche Motor-Typen, die gleich angeschlossen werden aber unterschiedlich funktionieren? Mal abgesehen von der Baugröße und das der Mähmotor kein Getriebe hat.
Schöne Grüße aus Berlin
Andre
")

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}