Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Wie erkennen ob der Roboter in der Ladestation ist
- Ersteller nero76
- Erstellt am
An die von Uwe genannten Nachteile durch das Relais hatte ich auch gedacht. Mir gefällt die letzte Lösung von Uwe eigentlich sehr gut ") - Ich hoffe Stefan kann auch davon überzeugt werden. Wir sparen uns den ganzen Relais-Kram und haben den benötigten Reststrom. Kleiner Nachteil der Spannungsabfall durch die Diode (kann man vielleicht mit Leben...habe ich derzeit auch so im Mäher)...
- Ich hoffe Stefan kann auch davon überzeugt werden. Wir sparen uns den ganzen Relais-Kram und haben den benötigten Reststrom. Kleiner Nachteil der Spannungsabfall durch die Diode (kann man vielleicht mit Leben...habe ich derzeit auch so im Mäher)...
- Ich hoffe Stefan kann auch davon überzeugt werden. Wir sparen uns den ganzen Relais-Kram und haben den benötigten Reststrom. Kleiner Nachteil der Spannungsabfall durch die Diode (kann man vielleicht mit Leben...habe ich derzeit auch so im Mäher)...kurzschuss
Administrator
dann gleich nochmal umgeändert

Die Ladespannung und der Ladestrom werden doch erfasst. Damit müsste doch ein Überladen verhindert werden können
Man braucht 2 neue Grenz Werte
Ladeendspannung und Ladeendstrom
Wenn die Ladeendspannung erreicht wird bzw der Ladeendstrom unterschritten wird ist der Akku voll.
Ladeendstrom = gemessene Strom - Led Strom.
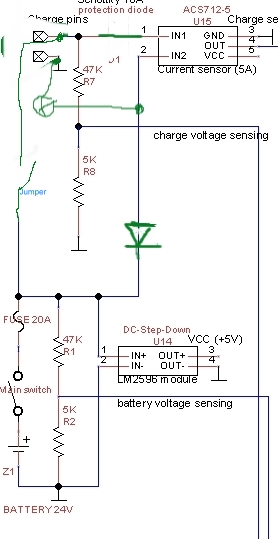
Durch die Umänderung die ich jetzt gezeichnet habe fließt der Strom der Led oder Kontrollleuchten auch über den Sensor und wir mit erfasst.
Dadurch wird der Strom der Led bereits mitgemessen und es müsste eigentlich eine genaue Erkennung möglich sein. Außerdem hat man immer ein gewissen definierten Grundstrom durch die Led womit man den Stromsensor besser kalibrieren könnte. Der Strom der LED ist ja bekannt bzw berechnet
Vielleicht noch ein Jumper dazwischen damit man den Stromsensor dann nullmässig und einmal mit der Diode kalibrieren kann. ( Ist noch nicht ganz durch gedacht)
Gruß
Uwe
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/1259/24.jpg/
Die Ladespannung und der Ladestrom werden doch erfasst. Damit müsste doch ein Überladen verhindert werden können
Man braucht 2 neue Grenz Werte
Ladeendspannung und Ladeendstrom
Wenn die Ladeendspannung erreicht wird bzw der Ladeendstrom unterschritten wird ist der Akku voll.
Ladeendstrom = gemessene Strom - Led Strom.
Durch die Umänderung die ich jetzt gezeichnet habe fließt der Strom der Led oder Kontrollleuchten auch über den Sensor und wir mit erfasst.
Dadurch wird der Strom der Led bereits mitgemessen und es müsste eigentlich eine genaue Erkennung möglich sein. Außerdem hat man immer ein gewissen definierten Grundstrom durch die Led womit man den Stromsensor besser kalibrieren könnte. Der Strom der LED ist ja bekannt bzw berechnet
Vielleicht noch ein Jumper dazwischen damit man den Stromsensor dann nullmässig und einmal mit der Diode kalibrieren kann. ( Ist noch nicht ganz durch gedacht)
Gruß
Uwe
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/1259/24.jpg/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
kurzschuss
Administrator
So noch mal geändert und ein zusätzlichen Jumper eingebaut.
Damit lässt sich jetzt folgendes machen.
1 Nullpunktkalibrierung des Stromsensors wenn nichts angeschlossen ist.
2 Grundstrom Kalibrierung des Stromsensors wenn der Jumper geschlossen ist. (Led Leuchtet). Der Jumper muss so verdrahtet werden damit die Stromrichtung des Stromsensors die selbe ist als wenn das Ladegerät angeschlossen ist.
Akku Überwachung:
Wie schon vorher geschrieben:
Die Ladespannung und der Ladestrom werden doch erfasst. Damit müsste doch ein Überladen verhindert werden können
Man braucht 2 neue Grenz Werte
Ladeendspannung und Ladeendstrom
Wenn die Ladeendspannung erreicht wird bzw der Ladeendstrom unterschritten wird ist der Akku voll.
Ladeendstrom = gemessene Strom - Led Strom.
Außerdem haben wir auf den Mega Board ja auch noch eine Zeitmessung. Aus der Summe Spannung Strom und Zeit lässt sich doch die Ladungsmenge in Ah Amperstunden ausrechnen. Damit haben wir ein weiteres Abschaltkriterium der Ladefunktion und zwar die Ladungsmenge. Jeder weiß ja was für eine Kapazität an Akkuleistung bei sich eingebaut ist.
Damit haben wir ein 3 Abschaltkriterium und zwar die Ladungsmenge.
Die Erfassung und Berechnung der Ladungsmenge dürfte auch kein Problem sein da er ja in der Ladestation steht und sonst ja keine anderen Berechnungen machen muß. Ich hatte mal im Internet irgendwo ein Sketsch gesehen wie jemand das bereits über Spannung und Strom Sensoren umgesetzt hat. Ich werde mal danach suchen.
Wenn jetzt noch am Bord etwas Platz vorhanden ist würde ich dort noch ein Temperatur Sensor fest einbauen um die Umgebungstemperatur zu erfassen.
z.B DS18B20 bei Reichelt ca 1,60Euro oder andere. Ich habe welche zu Hause die es auch fertig als Anlegefühler gibt.
Ein weiter Anschluss für ein Temperatursensor extern vorsehen für den Akku und man hätte aus der Differenz der Umgebungstemperatur und der Akkutemperatur ein 4 Abschaltkriterium für die Ladefunktion.
Wenn man wollte könnte man im Prinzip ebenfalls noch 3 weitere externe Temperatur Sensoren vorsehen für die beiden Antriebs und den Mähmotor. Dann hat man die totale Überwachung.
Gruß
Uwe
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/1259/25.jpg/
Damit lässt sich jetzt folgendes machen.
1 Nullpunktkalibrierung des Stromsensors wenn nichts angeschlossen ist.
2 Grundstrom Kalibrierung des Stromsensors wenn der Jumper geschlossen ist. (Led Leuchtet). Der Jumper muss so verdrahtet werden damit die Stromrichtung des Stromsensors die selbe ist als wenn das Ladegerät angeschlossen ist.
Akku Überwachung:
Wie schon vorher geschrieben:
Die Ladespannung und der Ladestrom werden doch erfasst. Damit müsste doch ein Überladen verhindert werden können
Man braucht 2 neue Grenz Werte
Ladeendspannung und Ladeendstrom
Wenn die Ladeendspannung erreicht wird bzw der Ladeendstrom unterschritten wird ist der Akku voll.
Ladeendstrom = gemessene Strom - Led Strom.
Außerdem haben wir auf den Mega Board ja auch noch eine Zeitmessung. Aus der Summe Spannung Strom und Zeit lässt sich doch die Ladungsmenge in Ah Amperstunden ausrechnen. Damit haben wir ein weiteres Abschaltkriterium der Ladefunktion und zwar die Ladungsmenge. Jeder weiß ja was für eine Kapazität an Akkuleistung bei sich eingebaut ist.
Damit haben wir ein 3 Abschaltkriterium und zwar die Ladungsmenge.
Die Erfassung und Berechnung der Ladungsmenge dürfte auch kein Problem sein da er ja in der Ladestation steht und sonst ja keine anderen Berechnungen machen muß. Ich hatte mal im Internet irgendwo ein Sketsch gesehen wie jemand das bereits über Spannung und Strom Sensoren umgesetzt hat. Ich werde mal danach suchen.
Wenn jetzt noch am Bord etwas Platz vorhanden ist würde ich dort noch ein Temperatur Sensor fest einbauen um die Umgebungstemperatur zu erfassen.
z.B DS18B20 bei Reichelt ca 1,60Euro oder andere. Ich habe welche zu Hause die es auch fertig als Anlegefühler gibt.
Ein weiter Anschluss für ein Temperatursensor extern vorsehen für den Akku und man hätte aus der Differenz der Umgebungstemperatur und der Akkutemperatur ein 4 Abschaltkriterium für die Ladefunktion.
Wenn man wollte könnte man im Prinzip ebenfalls noch 3 weitere externe Temperatur Sensoren vorsehen für die beiden Antriebs und den Mähmotor. Dann hat man die totale Überwachung.
Gruß
Uwe
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/1259/25.jpg/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
kurzschuss
Administrator
Zuletzt bearbeitet von einem Moderator:
kurzschuss
Administrator
Ja, dafür würde dann aber ein einfaches Relais reichen um die Ladung zu unterbrechen.
Ein zweite Möglichkeit wäre das wenn der Akku voll ist und die Ladung abgeschlossen ist, aber der Mäher noch nicht arbeiten soll einfach 5 oder 10cm Rückwärts aus der Ladestation fährt und in warte Stellung bleibt.
Obwohl ich da die 1 Möglichkeit mit dem Relais vorziehen würde um die Ladung zu unterbrechen. Damit könnte man dann auch einfach eine Überwinterungsfunktion für den Akku integrieren.
Oder dann noch ein 2 Relais mit ein Lastwiderstand falls in der Überwinterungsfunktion eine Entladung vorgesehen sein soll.
Noch eine Möglichkeit wäre ein Relais zu nehmen was ein etwas höhreren Spulenstrom benötigt. Evl über ein Transistor schalten. Dann hätte man über das Relais ein integrierten Verbraucher für die Entladung. Es müsste nur ein Relais sein was 100%ED hat also für Dauerbetrieb ausgelegt ist. Dann würde ein Relais reichen.
Auf alle fälle denke ich aber das jetzt in der letzten Zeichnung gewährleistet sein müßte das im Schleifensender sowohl auch im Mover der Strom eindeutig erkannt wird.
Die Ladungsunterbrechung würde ich dann über das Relais machen. Dort würde ich aber ein Öffner einsetzen, damit falls der Akku tiefentladenen ist das das Relais schon geschlossen ist. Wenn er in der Ladestation steht und soll nicht fahren kann über das Relais die Ladung unterbrochen werden (Relais zieht an). Sollte er dann fahren kann ja das Relais wieder abfallen bzw geschlossen sein da er jetzt ja nicht mehr an den Ladekontakten hängt.
Gruß
Uwe
Ein zweite Möglichkeit wäre das wenn der Akku voll ist und die Ladung abgeschlossen ist, aber der Mäher noch nicht arbeiten soll einfach 5 oder 10cm Rückwärts aus der Ladestation fährt und in warte Stellung bleibt.
Obwohl ich da die 1 Möglichkeit mit dem Relais vorziehen würde um die Ladung zu unterbrechen. Damit könnte man dann auch einfach eine Überwinterungsfunktion für den Akku integrieren.
Oder dann noch ein 2 Relais mit ein Lastwiderstand falls in der Überwinterungsfunktion eine Entladung vorgesehen sein soll.
Noch eine Möglichkeit wäre ein Relais zu nehmen was ein etwas höhreren Spulenstrom benötigt. Evl über ein Transistor schalten. Dann hätte man über das Relais ein integrierten Verbraucher für die Entladung. Es müsste nur ein Relais sein was 100%ED hat also für Dauerbetrieb ausgelegt ist. Dann würde ein Relais reichen.
Auf alle fälle denke ich aber das jetzt in der letzten Zeichnung gewährleistet sein müßte das im Schleifensender sowohl auch im Mover der Strom eindeutig erkannt wird.
Die Ladungsunterbrechung würde ich dann über das Relais machen. Dort würde ich aber ein Öffner einsetzen, damit falls der Akku tiefentladenen ist das das Relais schon geschlossen ist. Wenn er in der Ladestation steht und soll nicht fahren kann über das Relais die Ladung unterbrochen werden (Relais zieht an). Sollte er dann fahren kann ja das Relais wieder abfallen bzw geschlossen sein da er jetzt ja nicht mehr an den Ladekontakten hängt.
Gruß
Uwe
kurzschuss
Administrator
Muss es eigentlich ein Relais sein um die Ladung zu unterbrechen, oder würde ein Mosfet auch gehen ? z.B IRLIZ44N oder ähnlich. Oder hätten wir da dann auch wider ein Spannungsfall wenn er durch schalten tut.
Ich denke aber das es dann wider zu Problemen kommen kann wenn der Akku tiefentladen ist. Wie kann dann das Schield die Spannung auf den Mosfet schalten wenn der Akku leer ist?
Ich denke diese Möglichkeit können wir vergessen - gibt nur Probleme bei der Tiefentladung. Selbst wenn die Ladespannung anliegt muss der Mosfet ja schalten und mit leeren Akku geht das nicht.
Gruß
Uwe
Ich denke aber das es dann wider zu Problemen kommen kann wenn der Akku tiefentladen ist. Wie kann dann das Schield die Spannung auf den Mosfet schalten wenn der Akku leer ist?
Ich denke diese Möglichkeit können wir vergessen - gibt nur Probleme bei der Tiefentladung. Selbst wenn die Ladespannung anliegt muss der Mosfet ja schalten und mit leeren Akku geht das nicht.
Gruß
Uwe
Die Lösung mit dem Relais (zur Unterbrechung) erscheint mir am sinnvollsten.
Derzeit probiere ich testweise den "kleinen Verbraucher" zu erfassen und erkenne nun warum es (noch) nicht so richtig klappen will: sobald meine Schleife an ist, geht der Spannungsausgang des Ladepin-Stromsensors (5A Type) bei mir um 0,1 Volt hoch (entspricht also einem Verbraucher von 200 mA - für eine robuste Erkennung müsste Verbraucher im Roboter also darüber liegen). Derzeit verursacht also die Schleife Störungen beim Stromsensor für die Ladepins
Mal sehen wie man das in den Griff bekommen kann (Kabel anders verlegen, Stromsensor weit weg... - nicht so einfach bei einem 20cm x10 cm Gehäuse...)
NACHTRAG: Die Meßdatenverarbeitung (für die Stromsensoren) im Sender-Code ist weiter verbessert worden:
https://code.google.com/p/ardumower/source/browse/#svn%2Ftrunk%2Fsender
Derzeit probiere ich testweise den "kleinen Verbraucher" zu erfassen und erkenne nun warum es (noch) nicht so richtig klappen will: sobald meine Schleife an ist, geht der Spannungsausgang des Ladepin-Stromsensors (5A Type) bei mir um 0,1 Volt hoch (entspricht also einem Verbraucher von 200 mA - für eine robuste Erkennung müsste Verbraucher im Roboter also darüber liegen). Derzeit verursacht also die Schleife Störungen beim Stromsensor für die Ladepins
Mal sehen wie man das in den Griff bekommen kann (Kabel anders verlegen, Stromsensor weit weg... - nicht so einfach bei einem 20cm x10 cm Gehäuse...)
NACHTRAG: Die Meßdatenverarbeitung (für die Stromsensoren) im Sender-Code ist weiter verbessert worden:
https://code.google.com/p/ardumower/source/browse/#svn%2Ftrunk%2Fsender
kurzschuss
Administrator
Was für ein Ladegrät hast du den? Nicht das das vielleicht das Ladegerät eine Ladefunktion und eine Erhaltungsfunktion hat und dazwischen hin und her schalten tut ?
Zu den Verbraucher z.B Über die Led hätte man eine Anzeige. Vielleicht einfach parallel dazu den Platz für ein Drahtwiderstand vorsehen den man dann bei Bedarf anpassen kann.
Was noch ein Möglichkeit wäre und leicht umzusetzen ist wäre ein IR Entfernungsmesser in den Schleifensender zu integrieren ähnlich den Drop bzw Absturzsensor den ich in den Mover eingebaut habe. Dadurch das man ganz leicht Einfuß über den zu überwachenden Bereich hat wäre darüber eine Erkennung möglich ob der Ardumover in der Ladestation steht. Man könnte z.B sagen das wenn das Signal von den Sensor länger als 2-3 Minuten ansteht die Schleife abgeschaltet wird bzw wenn der Mover rausgefahren ist das das Signal wider ansteht und die Schleife eingeschaltet wird.
Diese Möglichkeit müste eigentlich Störunanfällig sein und man brauch nichts auszuwerten. Der Sensor hat ja nur ein 0 bzw 1 Signal und kann von den Nano ausgewertet werden.
Gruß
Uwe
Zu den Verbraucher z.B Über die Led hätte man eine Anzeige. Vielleicht einfach parallel dazu den Platz für ein Drahtwiderstand vorsehen den man dann bei Bedarf anpassen kann.
Was noch ein Möglichkeit wäre und leicht umzusetzen ist wäre ein IR Entfernungsmesser in den Schleifensender zu integrieren ähnlich den Drop bzw Absturzsensor den ich in den Mover eingebaut habe. Dadurch das man ganz leicht Einfuß über den zu überwachenden Bereich hat wäre darüber eine Erkennung möglich ob der Ardumover in der Ladestation steht. Man könnte z.B sagen das wenn das Signal von den Sensor länger als 2-3 Minuten ansteht die Schleife abgeschaltet wird bzw wenn der Mover rausgefahren ist das das Signal wider ansteht und die Schleife eingeschaltet wird.
Diese Möglichkeit müste eigentlich Störunanfällig sein und man brauch nichts auszuwerten. Der Sensor hat ja nur ein 0 bzw 1 Signal und kann von den Nano ausgewertet werden.
Gruß
Uwe
Ich habe an den Ladepins nichts angeschlossen. Dennoch Steigt die Ausgangs-Spannung am Stromsensor für die Ladepins um 0,1 V wenn die Schleife angeht. Die Spannungen des Ladegerätes (LiIon Mean Well ELN-60-27, 27V=2.3A) und an der Versorgung des Stromsensors (5V) sind konstant... (mit Oszi gemessen)
kurzschuss
Administrator
Das wäre eine Möglichkeit
Coole Sache was ihr da ausgetüftelt habt.
Ich werde das mal in den Schaltplan einbauen. Der muss sowieso überarbeitet werden da im Ladebereich ein Fehler drin war. Ist mir beim Einbau der Sicherung aufgefallen.
Also lassen wir das Relais wegfallen ?
Hab bloss im Augenblick wenig Zeit.
Stefan
Ich werde das mal in den Schaltplan einbauen. Der muss sowieso überarbeitet werden da im Ladebereich ein Fehler drin war. Ist mir beim Einbau der Sicherung aufgefallen.
Also lassen wir das Relais wegfallen ?
Hab bloss im Augenblick wenig Zeit.
Stefan
kurzschuss
Administrator
Ich denke Mal ein Relais werden wir brauchen um die Ladung zu unterbrechen.
Inwieweit es Sinnvoll ist auf der Hauptplatine die Kontrollleuchte auch über den Stromsensor laufen zu lassen weiß ich nicht. So hätte man aber auch über den Stromsensor von der Hautplatine immer ein gewissen Strom fließen was vielleicht die Auswertung des Sensors einfacher macht. Ich denke mal die Erkennung ob der Mover in der Ladestation steht geschiet über die Ladespannung.
Evl als Kontrollleuchte vielleicht eine 2 Led vorsehen oder noch ein Lastwiderstand. Ich weiß nicht ob eine Led mit ca 20mA ausreicht. Ich hatte nur gesehen das Alex im Sender Sketsch etwas mit 50mA als Grenzwert vorgesehen hat

Gruß
Uwe
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/1259/26.jpg/
Inwieweit es Sinnvoll ist auf der Hauptplatine die Kontrollleuchte auch über den Stromsensor laufen zu lassen weiß ich nicht. So hätte man aber auch über den Stromsensor von der Hautplatine immer ein gewissen Strom fließen was vielleicht die Auswertung des Sensors einfacher macht. Ich denke mal die Erkennung ob der Mover in der Ladestation steht geschiet über die Ladespannung.
Evl als Kontrollleuchte vielleicht eine 2 Led vorsehen oder noch ein Lastwiderstand. Ich weiß nicht ob eine Led mit ca 20mA ausreicht. Ich hatte nur gesehen das Alex im Sender Sketsch etwas mit 50mA als Grenzwert vorgesehen hat
Gruß
Uwe
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/1259/26.jpg/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
f_bruhn89@gmail_com
New member
Was haltet ihr von einem Reedkontakt am Mower und einem Magneten an der Ladestation.
Wir sollten ausprobieren, ob man mit einer LED für die Kontrolleuchte auskommt, so dass man dies noch robust messen kann. Theoretisch müsste es gehen (der 5A Stromsensor hat eine Empfindlichkeit von 185mV/A, der Arduino ADC hat eine Empfindlichkeit von 5V/1024 = 4,88mV - demnach müsste man auf 26 mA genau messen können...)
http://embedded-lab.com/uploads/datasheets/ACS712-Datasheet.pdf
http://embedded-lab.com/uploads/datasheets/ACS712-Datasheet.pdf
kurzschuss
Administrator
Wenn nicht nimmt man 2 LEDs oder mehr. Vorteil von den LED wären Langlebig und man kann den Strom genau defenieren
@Autega
ja werde ich mir mal ansehen, wäre echt klasse wenn man dann alles gleich teilen kann. Die Einarbeitung in Kicad war echt übel aber jetzt fängt es an spaß zu machen.
p@Alex grau ist alle Theorie, da hilft nur testen. ACS 712 misst doch positven und negativen Strom also ändert sich das dann schon mal:
10A/1024 =9,76 das könnte mit 20mA knapp werden.
Wenn man mehrere Led's nimmt hätte man einen höheren Strom und könnte die als Ladeanzeige nutzen.
Stefan
ja werde ich mir mal ansehen, wäre echt klasse wenn man dann alles gleich teilen kann. Die Einarbeitung in Kicad war echt übel aber jetzt fängt es an spaß zu machen.
p@Alex grau ist alle Theorie, da hilft nur testen. ACS 712 misst doch positven und negativen Strom also ändert sich das dann schon mal:
10A/1024 =9,76 das könnte mit 20mA knapp werden.
Wenn man mehrere Led's nimmt hätte man einen höheren Strom und könnte die als Ladeanzeige nutzen.
Stefan