Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Sheep Sheep
- Ersteller holoratte
- Erstellt am
Welche FreeCad Version verwendest du und noch irgendwelche Zusatzmodule? Ich habe 0.16 und 0.17 probiert und kann das File nicht öffnen. Da Fehlt möglicherweise noch ein Zusatzmodul für den Zusammenbau?
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2936/KiCadFehler_2018-04-14.png/
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2936/KiCadFehler_2018-04-14.png/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
Hallo Roland,
gezeichnet habe ich das mit dieser Version:
OS: Windows 10
Word size of OS: 64-bit
Word size of FreeCAD: 64-bit
Version: 0.17.11104 (Git)
Build type: Release
Branch: master
Hash: 1b2b964c35bd0f989f1f833a372c48e08cec0194
Python version: 2.7.8
Qt version: 4.8.7
Coin version: 4.0.0a
OCC version: 7.1.0
ich habe viele Module installiert (assembly2, fasteners,drawing dimension, gear), für die diese Teile aber kein zusätzliches verwendet.
Mit der Version 0.18pre Win 10 64bit - ohne Zusatzmodule - kann ich das File ohne Probleme öffnen.
Gruess
Chris
gezeichnet habe ich das mit dieser Version:
OS: Windows 10
Word size of OS: 64-bit
Word size of FreeCAD: 64-bit
Version: 0.17.11104 (Git)
Build type: Release
Branch: master
Hash: 1b2b964c35bd0f989f1f833a372c48e08cec0194
Python version: 2.7.8
Qt version: 4.8.7
Coin version: 4.0.0a
OCC version: 7.1.0
ich habe viele Module installiert (assembly2, fasteners,drawing dimension, gear), für die diese Teile aber kein zusätzliches verwendet.
Mit der Version 0.18pre Win 10 64bit - ohne Zusatzmodule - kann ich das File ohne Probleme öffnen.
Gruess
Chris
Hallo Alfred,
das sind 625ZZ Bearings - 5 x 16 x 5. Ich habe die bei e3d bestellt.
Die "Achsen" sind M5x10 Senkkopf-Schrauben. Gewinde ist direkt in den Plastik der inneren Träger geschnitten. das hält soweit ganz gut.
M5 Gewindestangen sind die alternative.
Mein 3D Drucker ist nicht super kalibriert. Er macht die Lagersitze ca 0.3mm zu klein. Entsprechend habe ich die Durchmesser etwas grösser gewählt.
Die Hartkupferrohre muss ich ca alle 3Wochen mit Schleifpapier abziehen um gute Kontakte zu erhalten. Das Kupfer oxidiert halt so vor sich her.
Gruess
Chris
das sind 625ZZ Bearings - 5 x 16 x 5. Ich habe die bei e3d bestellt.
Die "Achsen" sind M5x10 Senkkopf-Schrauben. Gewinde ist direkt in den Plastik der inneren Träger geschnitten. das hält soweit ganz gut.
M5 Gewindestangen sind die alternative.
Mein 3D Drucker ist nicht super kalibriert. Er macht die Lagersitze ca 0.3mm zu klein. Entsprechend habe ich die Durchmesser etwas grösser gewählt.
Die Hartkupferrohre muss ich ca alle 3Wochen mit Schleifpapier abziehen um gute Kontakte zu erhalten. Das Kupfer oxidiert halt so vor sich her.
Gruess
Chris
Hab sonen 3D Druckdienst im Netz gefunden, der die Datei als .stl benötigt. Ich finde es nicht ganz klar, wie man in FreeCAD nach stl exportiert. Weiss nicht mal so recht, welche der Formen ich exportieren muss. Kenn mich mit sowas gar nicht aus. https://www.freecadweb.org/wiki/Export_to_STL_or_OBJ/de hier ist zwar ne Anleitung, aber das erzeugt immer eine Datei pro Form. Muss ich die vorhandenen erstmal irgendwie vereinen? Wie? und welche genau? Ich seh da insbesondere sonen riesigen länglichen Quader, den ich sicher nicht mit ausdrucken soll, oder?
Kannst Du ne kleine Anleitung posten, wie ich eine stl exportiere?
Kannst Du ne kleine Anleitung posten, wie ich eine stl exportiere?
Hallo Chris,
ich verwende deine Software, da Sie die Einzige ist bei der die Odometrie und alles andere vernünftig läuft. Danke dafür.
Jetzt wollte ich die RC aktivieren und habe den entsprechenden Code unkommted.
Sobald ich das mache bekomme ich Fehler von der Odo.
Die Odo läuft doch auf Interrupt 2 und die RC auf Interrupt 0.
Hast du einen Tip für mich ?
Stefan
ich verwende deine Software, da Sie die Einzige ist bei der die Odometrie und alles andere vernünftig läuft. Danke dafür.
Jetzt wollte ich die RC aktivieren und habe den entsprechenden Code unkommted.
Sobald ich das mache bekomme ich Fehler von der Odo.
Die Odo läuft doch auf Interrupt 2 und die RC auf Interrupt 0.
Hast du einen Tip für mich ?
Stefan
Profilsegmente für SheepSheep:
hält soweit ganz gut mit je 3 M5x10 Schrauben. Mal schauen wie lange...
Die Spikes greifen erst wenn die normalen Räder einsinken.

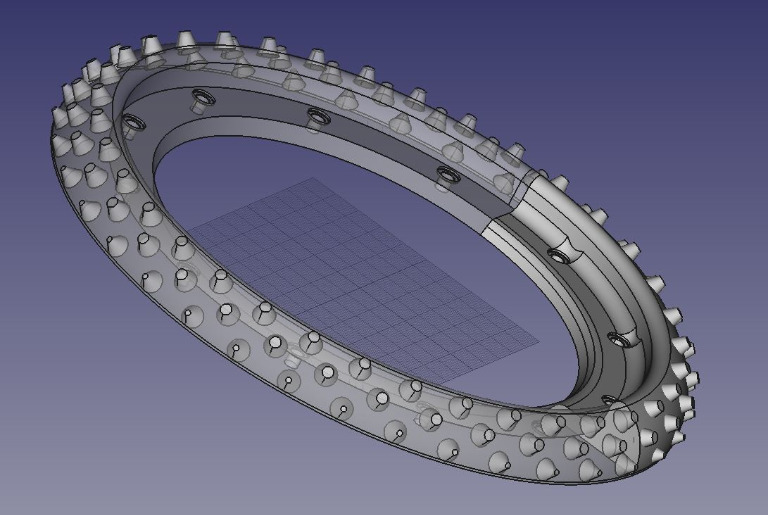
Die FreeCad files gibt es hier im SheepSheep Branch .
Gedruckt habe ich die wiederum in ASA mit 5 Perimeter/Toplayer.
Gruess
Chris
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2380/WP_20180615_0031.jpg/
hält soweit ganz gut mit je 3 M5x10 Schrauben. Mal schauen wie lange...
Die Spikes greifen erst wenn die normalen Räder einsinken.
Die FreeCad files gibt es hier im SheepSheep Branch .
Gedruckt habe ich die wiederum in ASA mit 5 Perimeter/Toplayer.
Gruess
Chris
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2380/WP_20180615_0031.jpg/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
Hallo Chris,
ich verwende deine Software, da Sie die Einzige ist bei der die Odometrie und alles andere vernünftig läuft. Danke dafür.
Jetzt wollte ich die RC aktivieren und habe den entsprechenden Code unkommentiert.
Sobald ich das mache bekomme ich Fehler von der Odometrie.
Die Odometrie läuft doch auf Interrupt 2 und die RC auf Interrupt 0.
Hast du einen Tip für mich ?
Gruß Stefan
ich verwende deine Software, da Sie die Einzige ist bei der die Odometrie und alles andere vernünftig läuft. Danke dafür.
Jetzt wollte ich die RC aktivieren und habe den entsprechenden Code unkommentiert.
Sobald ich das mache bekomme ich Fehler von der Odometrie.
Die Odometrie läuft doch auf Interrupt 2 und die RC auf Interrupt 0.
Hast du einen Tip für mich ?
Gruß Stefan
Hallo Michael,
das hat am Anfang mit dem Eigengewicht gut funktioniert, allerdings müssen die Kabelverbindungen flexibel sein, auch bei tieferen Temperaturen. Silikonlitze ist zu bevorzugen.
Nach einer Woche war der Kontakt dann nicht mehr so toll. Dann habe ich Gewichte eingeklebt, ca 30g pro Abnehmer.
Habe dann gemerkt das das Kupfer Oxidiert und wieder schlechten Kontakt macht.
Jetzt schleife ich die Kontakte bei jedem Messerwechsel mit Schleifpapier blank (ca alle 3 Wochen).
So geht das ganz gut.
Gruess
Chris
das hat am Anfang mit dem Eigengewicht gut funktioniert, allerdings müssen die Kabelverbindungen flexibel sein, auch bei tieferen Temperaturen. Silikonlitze ist zu bevorzugen.
Nach einer Woche war der Kontakt dann nicht mehr so toll. Dann habe ich Gewichte eingeklebt, ca 30g pro Abnehmer.
Habe dann gemerkt das das Kupfer Oxidiert und wieder schlechten Kontakt macht.
Jetzt schleife ich die Kontakte bei jedem Messerwechsel mit Schleifpapier blank (ca alle 3 Wochen).
So geht das ganz gut.
Gruess
Chris
OK, ich sehe mir mal an ob ich das mit Federn für den Anpressdruck realisiere, der Mower hat ja genug Power da ordentlich drunter zu kriechen.
Mache gerade meine ersten Versuche und habe als Kontaktgeber ein schnödes Edelstahllochband auf eine Dachlatte geschraubt, der Mower hat Edelstahlmöbelgriffe alsStromaufnehmer ... primitiv, aber für die ersten Versuche klappt das erstaunlich gut und der Anpressdruck würde die Oxidation wahrscheinlich weg schmirgeln...
Melde mich wenn ich eine Lösung habe.
Sorge macht mir noch das Rückwärts ausparken, da fährt er immer eine leiche Kurve beim Anhalten, ich muss aber eine paar Meter exakt geradeaus zurück. Wenn ich im Manual Modus Rückwärts fahre klappt das exakt ohne jedes Kürvchen... hat da jemand eine Idee waran das liegen kann?
Gruß, Michael
Mache gerade meine ersten Versuche und habe als Kontaktgeber ein schnödes Edelstahllochband auf eine Dachlatte geschraubt, der Mower hat Edelstahlmöbelgriffe alsStromaufnehmer ... primitiv, aber für die ersten Versuche klappt das erstaunlich gut und der Anpressdruck würde die Oxidation wahrscheinlich weg schmirgeln...
Melde mich wenn ich eine Lösung habe.
Sorge macht mir noch das Rückwärts ausparken, da fährt er immer eine leiche Kurve beim Anhalten, ich muss aber eine paar Meter exakt geradeaus zurück. Wenn ich im Manual Modus Rückwärts fahre klappt das exakt ohne jedes Kürvchen... hat da jemand eine Idee waran das liegen kann?
Gruß, Michael
@Stefan: Du wurdest wohl erst gerade freigeschaltet, deine Meldung wurde eben erst angezeigt...
eventuell habe ich da etwas zerschossen. Hier siehst Du die Änderungen, welche ich für den 2018 Code gemacht habe
changelog und changelog2 . Da sind 2 Stellen die ich auskommentiert habe was die RC anbelangt. Das hatte wohl seinen Grund, nur kann ich mich im Moment nicht daran erinnern welcher das war...
Falls ich das wieder abrufen kann, melde ich mich wieder.
Die RC nutze ich über meine NRF24 Funkbrücke/Pfod-befehle und einen Joystick am PC. Habe leider keine RC-Funke. Kann das also nicht testen.
Versuche doch bitte mal, ob das im Dev2 Release noch funktioniert hat. Da ist aber der IMU nicht nutzbar.
Gruess
Chris
eventuell habe ich da etwas zerschossen. Hier siehst Du die Änderungen, welche ich für den 2018 Code gemacht habe
changelog und changelog2 . Da sind 2 Stellen die ich auskommentiert habe was die RC anbelangt. Das hatte wohl seinen Grund, nur kann ich mich im Moment nicht daran erinnern welcher das war...
Falls ich das wieder abrufen kann, melde ich mich wieder.
Die RC nutze ich über meine NRF24 Funkbrücke/Pfod-befehle und einen Joystick am PC. Habe leider keine RC-Funke. Kann das also nicht testen.
Versuche doch bitte mal, ob das im Dev2 Release noch funktioniert hat. Da ist aber der IMU nicht nutzbar.
Gruess
Chris
Hallo Chris,
danke für den Hinweis.
Ich vermute nicht das es an deinen Änderungen gelegen hat, nicht direkt.
In der mower.cpp wir für die pinMotorMowRpm der gleiche Interrupt verwendet wie für die Odometrie.
attachInterrupt(pinMotorMowRpm, PCINT2_vect, CHANGE);
Da meine RC aber gar keine Steuerung dafür hat ( nur Vor / Zurück , Rechts/Links ) habe ich den mal auskommentiert und teste mal.
Alternativ könnte man den auf den selben Interrupt legen wie die anderen Signale.
Gruß Stefan
danke für den Hinweis.
Ich vermute nicht das es an deinen Änderungen gelegen hat, nicht direkt.
In der mower.cpp wir für die pinMotorMowRpm der gleiche Interrupt verwendet wie für die Odometrie.
attachInterrupt(pinMotorMowRpm, PCINT2_vect, CHANGE);
Da meine RC aber gar keine Steuerung dafür hat ( nur Vor / Zurück , Rechts/Links ) habe ich den mal auskommentiert und teste mal.
Alternativ könnte man den auf den selben Interrupt legen wie die anderen Signale.
Gruß Stefan
Hallo Stefan,
Korrekt.
das ist die "Forw time max" in " Settings" "Motor" . Die begrenzt die StateTime. Wie lange er geradeaus respektive Spiralen dreht.
Die Spirale ist im STATE_FORWARD (robot.cpp) eingebunden.
Falls Du länger fahren willst müsstest Du das in der "pfod.cpp" ändern.
Gruess
Chris
Korrekt.
das ist die "Forw time max" in " Settings" "Motor" . Die begrenzt die StateTime. Wie lange er geradeaus respektive Spiralen dreht.
Die Spirale ist im STATE_FORWARD (robot.cpp) eingebunden.
Falls Du länger fahren willst müsstest Du das in der "pfod.cpp" ändern.
Gruess
Chris