So, ich glaube, 99% sind geschafft.
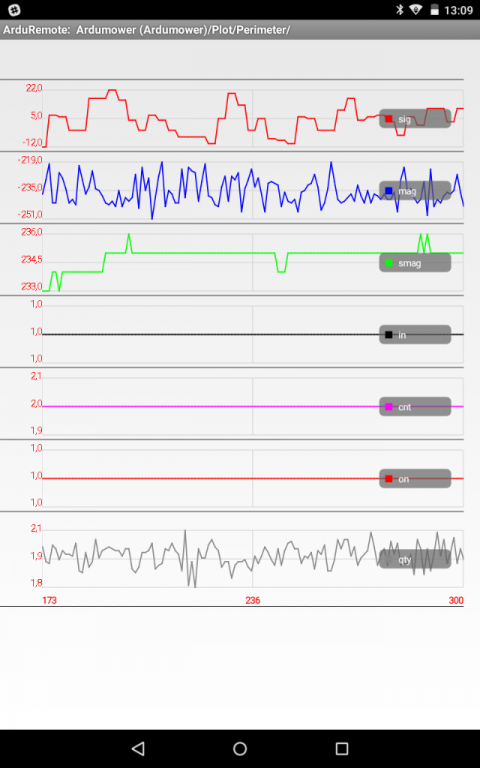
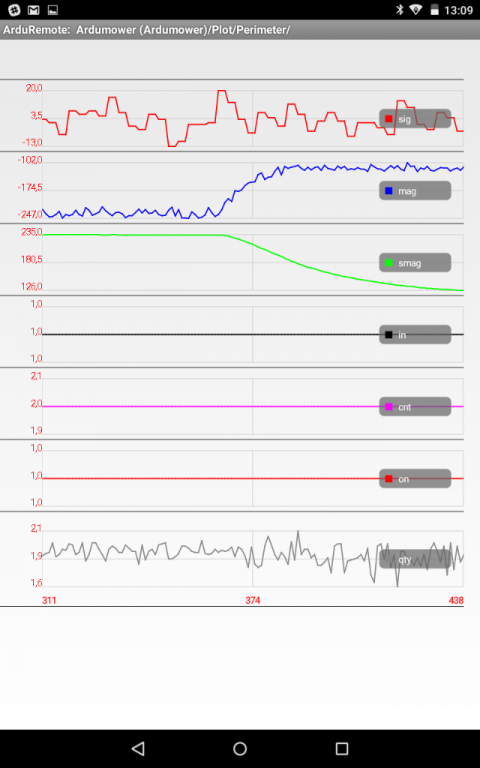
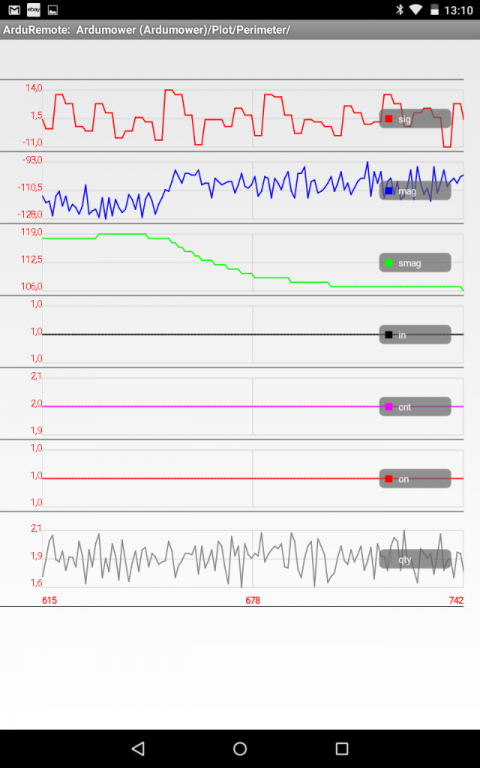
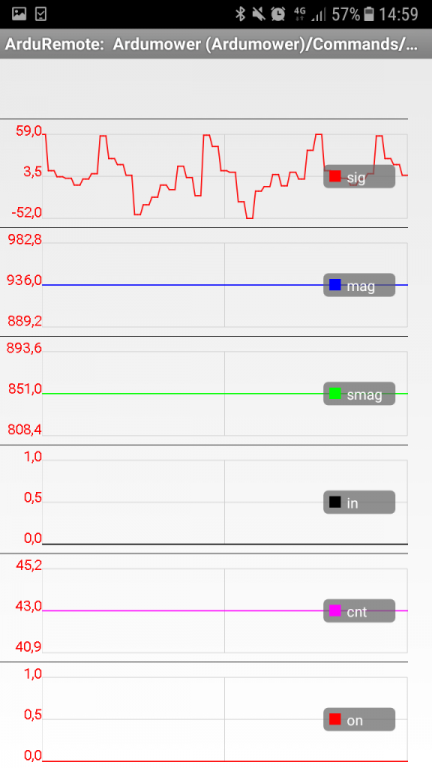
In der Mitte vom Grundstück beginnt mein Mower an zu tanzen. Vor, Stop, zurück, dreh, Vor, Stop, zurück, dreh. Den Status, den ich per ArduMower-App einfangen konnte, war POUTROLL. Ich finde in der Software nur die Definition der Status, aber nicht, was die Ursache dafür sein kann. Bedeutet das Perimeter Out Roll? Dachte, der Error-Counter dreht irgendwann hoch, wenn er die Schleife nicht mehr findet und bleibt dann stehen.
Den Status finde ich auch nicht in der Finiten State Maschine (http://wiki.ardumower.de/index.php?title=Ardumower_Software-Design). Oder ist damit der rote Bereich gemeint? Würde ja dann bedeuten, dass der Mower auf dem Weg nach Hause gegen ein Hindernis gefahren ist. Allerdings habe ich keine Hindernis-Sensorik (Ultraschall) aktiv. Bumper habe ich noch nicht, der Ultraschall sieht lautet Gespenster. Wollte nun aus China wasserdichte US-Sensoren aus dem Kfz-Bereich kommen lassen.
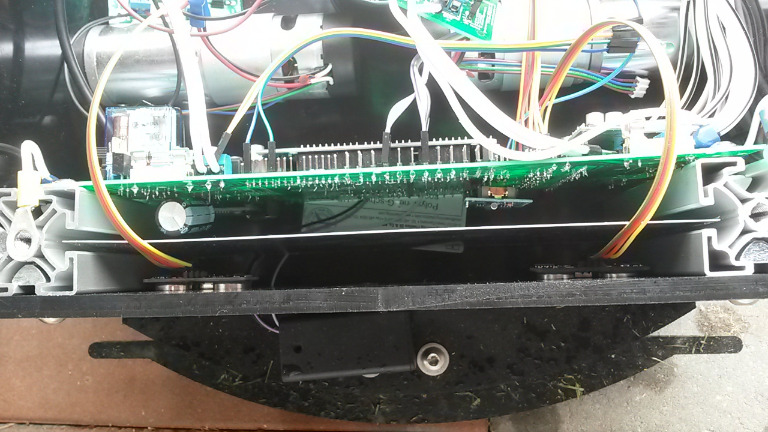
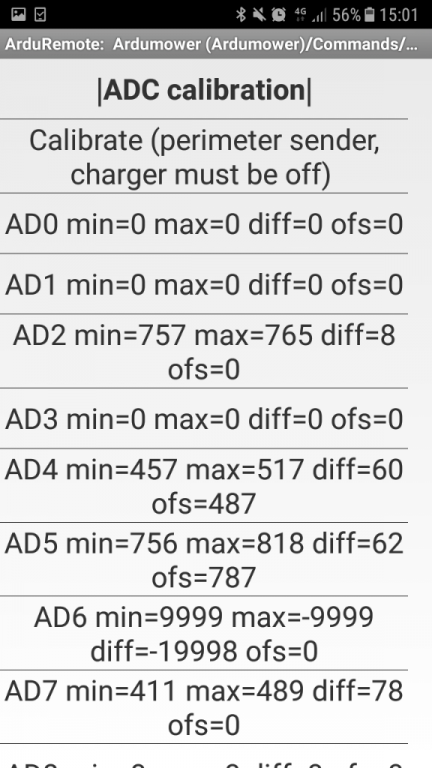
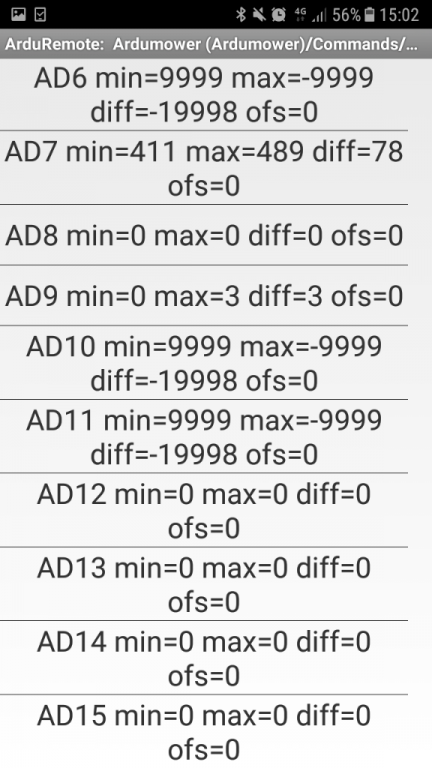
Beim Schreiben fällt mir grade auf, dass ich nach dem Receiver-Umbau möglicherweise nicht noch einmal kalibriert habe... Wenn POUTROLL aber nichts mit dem Perimeter zu tun hat, dann müsste ich woanders suchen.
In der Mitte vom Grundstück beginnt mein Mower an zu tanzen. Vor, Stop, zurück, dreh, Vor, Stop, zurück, dreh. Den Status, den ich per ArduMower-App einfangen konnte, war POUTROLL. Ich finde in der Software nur die Definition der Status, aber nicht, was die Ursache dafür sein kann. Bedeutet das Perimeter Out Roll? Dachte, der Error-Counter dreht irgendwann hoch, wenn er die Schleife nicht mehr findet und bleibt dann stehen.
Den Status finde ich auch nicht in der Finiten State Maschine (http://wiki.ardumower.de/index.php?title=Ardumower_Software-Design). Oder ist damit der rote Bereich gemeint? Würde ja dann bedeuten, dass der Mower auf dem Weg nach Hause gegen ein Hindernis gefahren ist. Allerdings habe ich keine Hindernis-Sensorik (Ultraschall) aktiv. Bumper habe ich noch nicht, der Ultraschall sieht lautet Gespenster. Wollte nun aus China wasserdichte US-Sensoren aus dem Kfz-Bereich kommen lassen.
Beim Schreiben fällt mir grade auf, dass ich nach dem Receiver-Umbau möglicherweise nicht noch einmal kalibriert habe... Wenn POUTROLL aber nichts mit dem Perimeter zu tun hat, dann müsste ich woanders suchen.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}