paddy
Active member
Halo zusammen,
dank der Unterstützung von Stephan verfügt der Bock jetzt auch über Odometrie. Über je eine Schlitzscheibe an der Motorachse wird mit dem Lichtschranken-Kit aus dem Shop die zurückgelegte Entfernung gemessen.

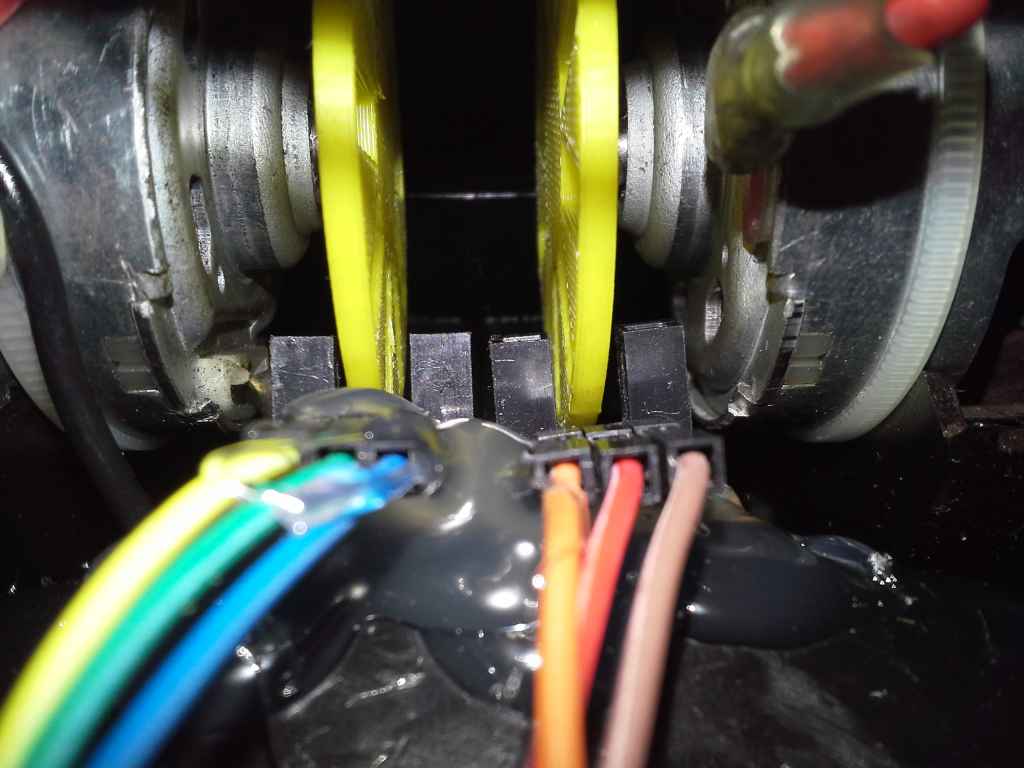
Damit erreiche ich etwa 9,9 Ticks pro cm und ca. 800 pro Radumdrehung. Problem ist nun aber, dass der Mower mit eingeschalteter Odometrie ca. 5 Minuten läuft und dann einfach stehen bleibt. Mähmotoren laufen weiter, aber Bluetooth bricht ab. Es scheint als ob der Mega abstürzt. Das Problem tritt auch auf, wenn Odometrie angeschlossen, aber deaktiviert ist. Ohne Odometrie (deaktiviert und ausgesteckt) mäht er ohne Kummer seit einigen Stunden.
Ich verwende zur Zeit die 1.0a5 Azurit. Hat jemand eine Idee, woran das liegt oder wie ich mich dem Problem nähern kann?
dank der Unterstützung von Stephan verfügt der Bock jetzt auch über Odometrie. Über je eine Schlitzscheibe an der Motorachse wird mit dem Lichtschranken-Kit aus dem Shop die zurückgelegte Entfernung gemessen.
Damit erreiche ich etwa 9,9 Ticks pro cm und ca. 800 pro Radumdrehung. Problem ist nun aber, dass der Mower mit eingeschalteter Odometrie ca. 5 Minuten läuft und dann einfach stehen bleibt. Mähmotoren laufen weiter, aber Bluetooth bricht ab. Es scheint als ob der Mega abstürzt. Das Problem tritt auch auf, wenn Odometrie angeschlossen, aber deaktiviert ist. Ohne Odometrie (deaktiviert und ausgesteckt) mäht er ohne Kummer seit einigen Stunden.
Ich verwende zur Zeit die 1.0a5 Azurit. Hat jemand eine Idee, woran das liegt oder wie ich mich dem Problem nähern kann?
