Aloha zusammen,
zuerst ziehe ich erstmal den Hut vor euch, die dieses Projekt zu dem gemacht haben, was es bis jetzt ist. Sehr schön
Persönlich bastel ich auch sehr gerne, nur in den letzten Jahren habe ich leider durch mein Informatikstudium keine Zeit mehr gefunden. Den Ardumower hatte ich vor 2 1/2 Jahren auch nachgebaut. Damals war ich schon sehr begeistert. (nur leider zum Einsatz ist er nicht gekommen :/ )
Topic:
In meiner Bachelorarbeit werde ich einen von meiner Uni entworfenen Mähroboter intelligenter machen.
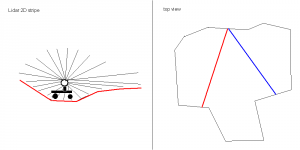
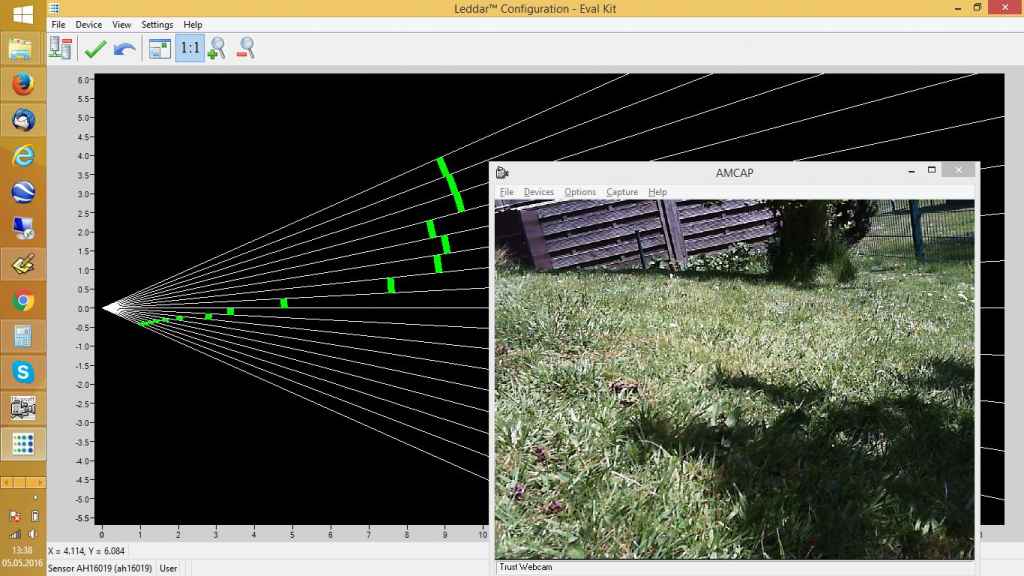
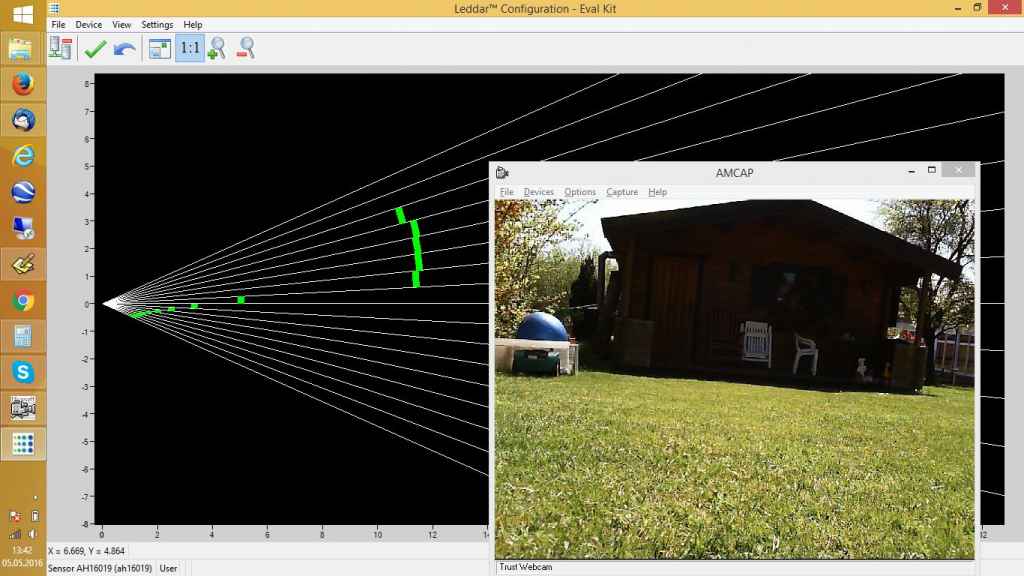
Lidar finde ich sehr interessant und es sieht toll aus.
Nur kann man das Grundstück nicht lieber mit nem Quadcopter autonom abfliegen lassen
Vorteil Hindernisse können in der Routenplanung mit einbezogen werden
Ausstattung Quadcopter:
- R/C modul (Verbindung zur Zentraleinheit)
- Gyro (Höhe halten)
- GPS (Differential-GPS)
- 5 Ultraschallsensoren (alle Himmelsrichtungen und Boden scannen)
und alles was das ding zum Fliegen benötigt

Meine Kinder lassen gerne alle Sachen auf dem Rasen liegen. (wirklich alle Albtraum für einen Roboter)
Mithilfe der Drohne wird nun eine 3d Aufzeichnung des Grundstückes angefertigt ca. 20 cm hoch.
Da nicht jedesmal alles gescannt werden soll, müssen feststehende Objekte erkannt werden. evtl. ein bissl Künstliche Intelligenz
Die Zentraleinheit soll nun die aufgenommenen Pkte des Copters verbinden und zeichnen.
Anschließend wie beim 3D-Drucker mit einem Slicer G-Code erstellen.
Die Zentraleinheit steuert nun den Mower extern durch G-Code-Befehle
opencv
ist auch sehr interessant
liebe Grüße und viel Erfolg noch








{kind=link}
{kind=link}
{kind=link}