Hallo Werner,
wo keine Gegenstände sind, braucht m.E. die Position auch nicht genau sein - problematisch sind wie Du schreibst die Randstellen (dort wo er nicht mähen soll) oder Engstellen. Dort sollte es sehr genau werden. Möglichst so genau wie mit einer Schleife. Und natürlich sollte er wissen wo er ist.
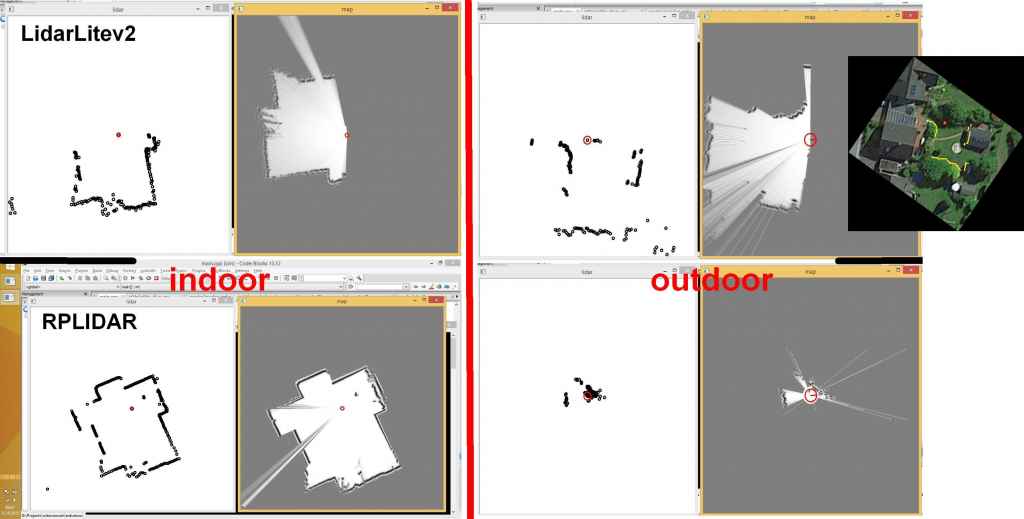
Vielleicht wäre das "LIDAR Lite v2" (http://www.exp-tech.de/lidar-lite-v2) eine Möglichkeit die Umgebung zu scannen? Die Reichweite wäre wohl gegeben. https://www.youtube.com/watch?v=mf45_cYzoV4
Bei Bäumen, Büschen usw. sehe ich immer das Problem von nicht vorhandenen Kanten beim Messen mit einem LIDAR...
Gruss,
Alexander
wo keine Gegenstände sind, braucht m.E. die Position auch nicht genau sein - problematisch sind wie Du schreibst die Randstellen (dort wo er nicht mähen soll) oder Engstellen. Dort sollte es sehr genau werden. Möglichst so genau wie mit einer Schleife. Und natürlich sollte er wissen wo er ist.
Vielleicht wäre das "LIDAR Lite v2" (http://www.exp-tech.de/lidar-lite-v2) eine Möglichkeit die Umgebung zu scannen? Die Reichweite wäre wohl gegeben. https://www.youtube.com/watch?v=mf45_cYzoV4
Bei Bäumen, Büschen usw. sehe ich immer das Problem von nicht vorhandenen Kanten beim Messen mit einem LIDAR...
Gruss,
Alexander
")



{kind=link}
{kind=link}
{kind=link}