Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Google Tango robot mower
- Ersteller nero76
- Erstellt am
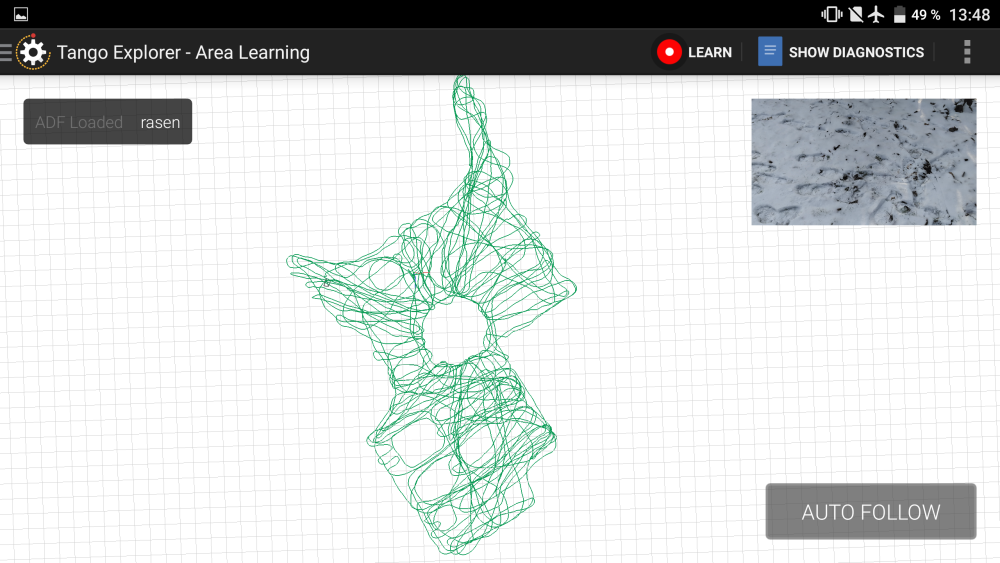
Ich habe heute mal einen quantitativen, etwas größeren Dauer-Test (d.h. flächig) im Garten gemacht, habe also auf der Fläche Rasenmäher gespielt - der max. Fehler lag bei gefühlten 50cm. Von allen Methoden die ich bisher ausprobiert habe ist es ingesamt die robustete, präziseste und einfachste Methode zur Positionsbestimmung. Die großen Lücken sind Bäume oder größere Gegenstände.
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/905/tango_lawn_mowing.png/
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/905/tango_lawn_mowing.png/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
Hallo,
das kann man sich aussuchen, Bluetooth, Wifi oder USB, alles wäre möglich. Derzeit umgesetzt habe ich Wifi: https://play.google.com/store/apps/details?id=de.grauonline.tangoanywhere
Übertragen werden derzeit einfach die Koordinaten (X,Y,Z) als json ASCII-Text (mit 5 Hz).
Gruss,
Alexander
das kann man sich aussuchen, Bluetooth, Wifi oder USB, alles wäre möglich. Derzeit umgesetzt habe ich Wifi: https://play.google.com/store/apps/details?id=de.grauonline.tangoanywhere
Übertragen werden derzeit einfach die Koordinaten (X,Y,Z) als json ASCII-Text (mit 5 Hz).
Gruss,
Alexander
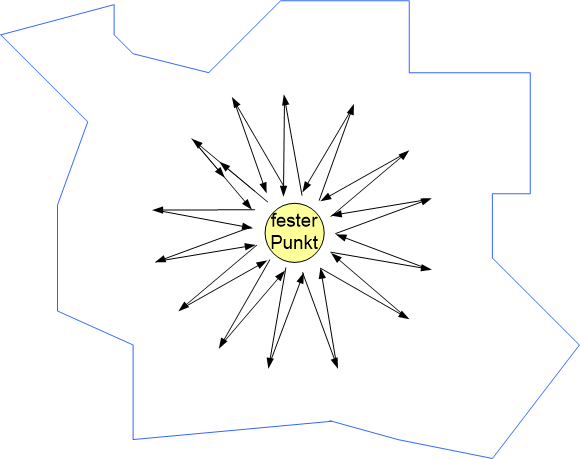
Das Anlernen der Umgebung (Area Learning) für die Wiedererkennung scheint dann am besten zu funktionieren wenn man von einem festen Punkt aus sternförmig einige Meter in alle Richtungen hin und zurück läuft, so dass die Umgebung vom Gerät an verschiedenen Stellen aus jeder Richtung gesehen wird.
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/905/tango_learning_2017-02-12.png/
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/905/tango_learning_2017-02-12.png/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
Hallo zusammen,
hier der Prototyp des allein auf Kamera-basierten Mähens. Viel Spaß beim Ansehen")
https://www.youtube.com/watch?v=w7HX3Q3A47w
Gruss,
Alexander
hier der Prototyp des allein auf Kamera-basierten Mähens. Viel Spaß beim Ansehen
https://www.youtube.com/watch?v=w7HX3Q3A47w
Gruss,
Alexander
Ich habe heute mal wieder einen etwas längeren Outdoor Test (diesmal ohne Roboter) durchgeführt. Die Wiedererkennung klappte gut. Jedesmal wenn etwas wiedererkannt wird springt die erkannte Position (x,y,z) schlagartig. Damit lässt sich ein maximaler Positions-Fehler ermitteln indem man fortlaufend das Maximum aller Sprünge ermittelt. Herausgekommen ist dabei ein...
maximaler Fehler von 38cm
Dieser Fehler ist akzeptabel. Die meiste Zeit springt die Position deutlich weniger (also der durchschnittliche Fehler).
maximaler Fehler von 38cm
Dieser Fehler ist akzeptabel. Die meiste Zeit springt die Position deutlich weniger (also der durchschnittliche Fehler).
Und mal ein Outdoor Test mit Roboter. In der ersten Hälfte fuhr der Roboter viel zu langsam, dann habe ich ihn schneller laufen lassen aber vergessen die PID-Parameter zu optimieren. Er torkelt daher ganz gut in der zweiten Hälfte - so sollte man es nicht machen (Bei 6 Grad, starkem Wind, Regen hatte ich darauf keinen Bock mehr )
https://www.youtube.com/watch?v=LvH6rKrCEA8
(Bei 6 Grad, starkem Wind, Regen hatte ich darauf keinen Bock mehr )https://www.youtube.com/watch?v=LvH6rKrCEA8
helldriver
Member
Sieht doch sehr gut und vielversprechend aus.
Hallo,
Wer sich für 3D Scannen, Augmented Reality oder 3D Distanzmessung interessert: ich habe noch ein weiteres neuwertiges Google-Tango Gerät günstig bekommen und biete es zum Verkauf an. Details kann man hier erfahren.
Mit dem Tango-Handy und der Ardumower Vision App kann man den Ardumower autonom per Kamera fahren lassen (Achtung: das ist alles sehr prototypisch, erwartet keine fertige Lösung. Details zu den Schritten könnt ihr hier im Abschnitt "Ardumower Vision - Quick Start" erfahren).
Gruss,
Alexander
Wer sich für 3D Scannen, Augmented Reality oder 3D Distanzmessung interessert: ich habe noch ein weiteres neuwertiges Google-Tango Gerät günstig bekommen und biete es zum Verkauf an. Details kann man hier erfahren.
Mit dem Tango-Handy und der Ardumower Vision App kann man den Ardumower autonom per Kamera fahren lassen (Achtung: das ist alles sehr prototypisch, erwartet keine fertige Lösung. Details zu den Schritten könnt ihr hier im Abschnitt "Ardumower Vision - Quick Start" erfahren).
Gruss,
Alexander
Hallo Marc,
leider hat Google das Tango-Projekt eingestellt (die Hardware-Komponenten für cm-genaue Lokalisierung mit Global-Shutter Kameras sind für den Massenmarkt einfach zu teuer) und Google versucht (wie Apple auch - Demo ) nun mit Standard Rolling-Shutter Kameras annähernd dasselbe Ziel zu erreichen. Der Tracking-Fehler ist jedoch deutlich höher (z.B. 50cm nach 60m).
Generell ist der Einsatz von Kamera-basierten Systeme für den Gartenbereich wo sich die Umgebung ständig (wenn auch nur geringfügig) ändert sehr anspruchsvoll. Ein weiterhin zu lösendes Problem ist die cm-genaue Wiedererkennung der Position um den akkumulierenden Fehler des Tracking-Systems wieder Richtung Null zu bekommen. Dazu wurden z.B. einige Tests mit DLIB gemacht ( Demo1 , Demo2 ) um zumindest Objekte zu erkennen (die Position genaue könnte man aus mehreren Objekten ableiten). Leider ist der Aufwand immens und die Ergebnisse wären nicht besonders präzise.
Alles in allem werden wohl Kamera-basierte Systeme zur Lokalisieurng nicht so schnell für Rasenroboter zum Einsatz kommen. Präzise DGPS-Systeme (cm-genau) hingegen holen derzeit in rasantem Tempo auf, werden deutlich günstiger und sind eine ernsthaftte Alternative für die Lokalisierung eines Rasenroboters.
Gruss,
Alexander
leider hat Google das Tango-Projekt eingestellt (die Hardware-Komponenten für cm-genaue Lokalisierung mit Global-Shutter Kameras sind für den Massenmarkt einfach zu teuer) und Google versucht (wie Apple auch - Demo ) nun mit Standard Rolling-Shutter Kameras annähernd dasselbe Ziel zu erreichen. Der Tracking-Fehler ist jedoch deutlich höher (z.B. 50cm nach 60m).
Generell ist der Einsatz von Kamera-basierten Systeme für den Gartenbereich wo sich die Umgebung ständig (wenn auch nur geringfügig) ändert sehr anspruchsvoll. Ein weiterhin zu lösendes Problem ist die cm-genaue Wiedererkennung der Position um den akkumulierenden Fehler des Tracking-Systems wieder Richtung Null zu bekommen. Dazu wurden z.B. einige Tests mit DLIB gemacht ( Demo1 , Demo2 ) um zumindest Objekte zu erkennen (die Position genaue könnte man aus mehreren Objekten ableiten). Leider ist der Aufwand immens und die Ergebnisse wären nicht besonders präzise.
Alles in allem werden wohl Kamera-basierte Systeme zur Lokalisieurng nicht so schnell für Rasenroboter zum Einsatz kommen. Präzise DGPS-Systeme (cm-genau) hingegen holen derzeit in rasantem Tempo auf, werden deutlich günstiger und sind eine ernsthaftte Alternative für die Lokalisierung eines Rasenroboters.
Gruss,
Alexander
xjust schrieb:is this still being developed?
Hi, please see the post of Alex (nero) before and translate to english. Short: no development stopped because of no really affordable cameras and Google stopped the Projekt as well.
Zuletzt bearbeitet von einem Moderator: