Guten Morgen zusammen, beginnen möchte ich mit einer kurzen Vorstellung. Mein Name ich Michel, ich bin 33 Jahre alt und besitze seit ca. 4 Jahren einen Robomow RC 308. Bis auf die üblichen Kinderkrankheiten bin ich mit dem Robo sehr zufrieden. Hierzu habe ich im Roboter-Forum.com bereits einiges an Support geleistet. Durch einen User dort bin ich erst auf das Projekt ArduMower aufmerksam geworden. Ich finde das Projekt wirklich super spannend und interessant.
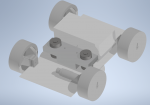
Nun zu meinem Plan, da mein Grundstück und die Rasenfläche Topographie bedingt einen steilen Hügel aufweist, möchte mich mir gerne einen 4wd Mäher bauen. Das handwerkliche Geschick sowie die nötigen Werkzeuge / Maschinen sollten ein Problem darstellen. Leider sind meine Kenntnisse über Ardumower und die Elektronikkomponenten sowie die Software noch recht dünn. Daher möchte ich euch gerne um Rat fragen.
Die Kraftübertragen von einer auf die zweite Achse möchte ich mit Riementrieben realisieren.
Die Begrenzung der Rasenfläche ist durch den bestehenden RC308 bereits mit einem Draht vorhanden.
Weitere Sensoren müsste der ArduMower nicht zwangsläufig besitzen.
Nice to have wäre es, dass chaotische Mähen auf eine Bahnenmähen umzustellen, was würde hierfür benötigt.
Ich freue mich auf eure Rückmeldungen.
LG und bleibt gesund.
Michel
Nun zu meinem Plan, da mein Grundstück und die Rasenfläche Topographie bedingt einen steilen Hügel aufweist, möchte mich mir gerne einen 4wd Mäher bauen. Das handwerkliche Geschick sowie die nötigen Werkzeuge / Maschinen sollten ein Problem darstellen. Leider sind meine Kenntnisse über Ardumower und die Elektronikkomponenten sowie die Software noch recht dünn. Daher möchte ich euch gerne um Rat fragen.
- Ist es möglich, die Mähbreite durch einen zweiten Mähmotor zu vergrößern und falls ja, wird dieser einfach parallel zum ersten Motor am Motortreiber angeschlossen?
- Welche Komponenten würdet ihr mir empfehlen? Ich möchte so viel wie möglich Teile aus dem Shop hier beziehen um das Projekt zu unterstützen.
Die Kraftübertragen von einer auf die zweite Achse möchte ich mit Riementrieben realisieren.
Die Begrenzung der Rasenfläche ist durch den bestehenden RC308 bereits mit einem Draht vorhanden.
Weitere Sensoren müsste der ArduMower nicht zwangsläufig besitzen.
Nice to have wäre es, dass chaotische Mähen auf eine Bahnenmähen umzustellen, was würde hierfür benötigt.
Ich freue mich auf eure Rückmeldungen.
LG und bleibt gesund.
Michel