Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Der Joschi 4x4
- Ersteller trapper54
- Erstellt am
")
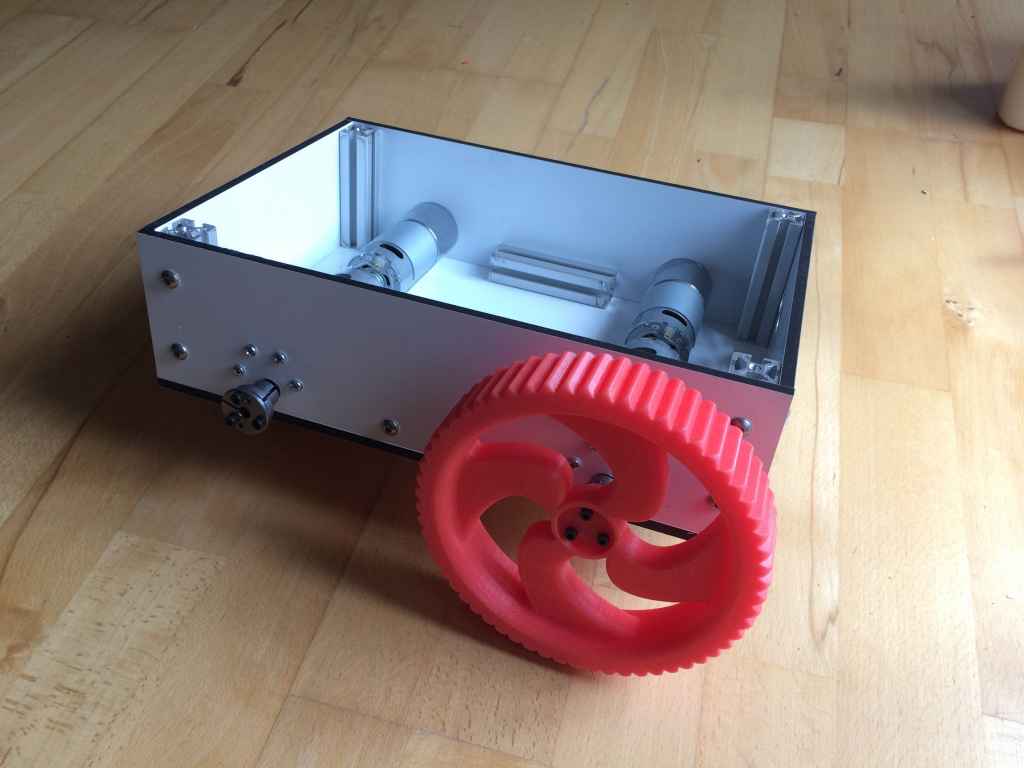
So es nimmt langsam Formen an
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2420/IMG_3547.jpg/
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2420/IMG_3547.jpg/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
paddy
Active member
Hallo,
das Design gefällt mir gut. Recht simpel aufgebaut aber dennoch robust. Möchtest du wirklich 4 Antriebsmotoren verwenden? Ich könnte mir vorstellen, dass es mit dem Gewicht und der Laufzeit Probleme geben könnte. Hast du schon überlegt, wie die Motoren pro Seite synchronisiert werden? [strike]Ich kann mir nicht vorstellen, dass zwei Motoren nach z.B: 30 Sekunden exakt die gleiche Anzahl Umdrehungen gemacht haben. Wenn aber zwei Motoren mit einer Kette verbunden sind würde das ungeregelt entweder starke Spannungen auf der Kette und damit Wirkverluste bedeuten und im schlimmsten Fall die Kette ruinieren (überspringen, reissen). Ich vermute aus diesem Grund haben die Ambrogio auch nur zwei Antriebsmotoren trotz 4x4 Antrieb.[/strike]
Habe gerade noch mal genauer hingeschaut und festgestellt, dass der Mäher nicht über Kettenantrieb verfügen soll. Also werden die Differenzen der Radumdrehungen lediglich Schlupf verursachen.
Die Räder gefallen mir sehr gut, sind gelungen.
das Design gefällt mir gut. Recht simpel aufgebaut aber dennoch robust. Möchtest du wirklich 4 Antriebsmotoren verwenden? Ich könnte mir vorstellen, dass es mit dem Gewicht und der Laufzeit Probleme geben könnte. Hast du schon überlegt, wie die Motoren pro Seite synchronisiert werden? [strike]Ich kann mir nicht vorstellen, dass zwei Motoren nach z.B: 30 Sekunden exakt die gleiche Anzahl Umdrehungen gemacht haben. Wenn aber zwei Motoren mit einer Kette verbunden sind würde das ungeregelt entweder starke Spannungen auf der Kette und damit Wirkverluste bedeuten und im schlimmsten Fall die Kette ruinieren (überspringen, reissen). Ich vermute aus diesem Grund haben die Ambrogio auch nur zwei Antriebsmotoren trotz 4x4 Antrieb.[/strike]
Habe gerade noch mal genauer hingeschaut und festgestellt, dass der Mäher nicht über Kettenantrieb verfügen soll. Also werden die Differenzen der Radumdrehungen lediglich Schlupf verursachen.
Die Räder gefallen mir sehr gut, sind gelungen.
Hallo Marco,
auch ich war am Wochenende nicht ganz untätig, komme aber erst heute zum Schreiben. Eins vorneweg: deine Räder sind der Hammer geworden! Ich sollte mir schon einen Satz reservieren lassen, wenn die in Serienfertigung gehen. Die Farbe erinnert ein wenig an Götzes Fußballschuhe (Hoffentlich riechen sie nicht so!).
Ich habe das neue Gehäuse mit Heißkleber verklebt und bestückt und ein paar Probeläufe gemacht.
Das erste Bild zeigt die beschnittene und gebohrte Platine. Bild zwei zeigt sie gefaltet, verklebt und teilweise bestückt. Bild drei bis auf den "Deckel" vollständig bestückt. Durch das Abkanten (von Hand) bekommt das Ganze eine unglaubliche Verwindungssteifigkeit. Nun kann es weitergehen...
Viele Grüße
Jürgen
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/1952/20160720_183508.jpg/
auch ich war am Wochenende nicht ganz untätig, komme aber erst heute zum Schreiben. Eins vorneweg: deine Räder sind der Hammer geworden! Ich sollte mir schon einen Satz reservieren lassen, wenn die in Serienfertigung gehen. Die Farbe erinnert ein wenig an Götzes Fußballschuhe (Hoffentlich riechen sie nicht so!).
Ich habe das neue Gehäuse mit Heißkleber verklebt und bestückt und ein paar Probeläufe gemacht.
Das erste Bild zeigt die beschnittene und gebohrte Platine. Bild zwei zeigt sie gefaltet, verklebt und teilweise bestückt. Bild drei bis auf den "Deckel" vollständig bestückt. Durch das Abkanten (von Hand) bekommt das Ganze eine unglaubliche Verwindungssteifigkeit. Nun kann es weitergehen...
Viele Grüße
Jürgen
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/1952/20160720_183508.jpg/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
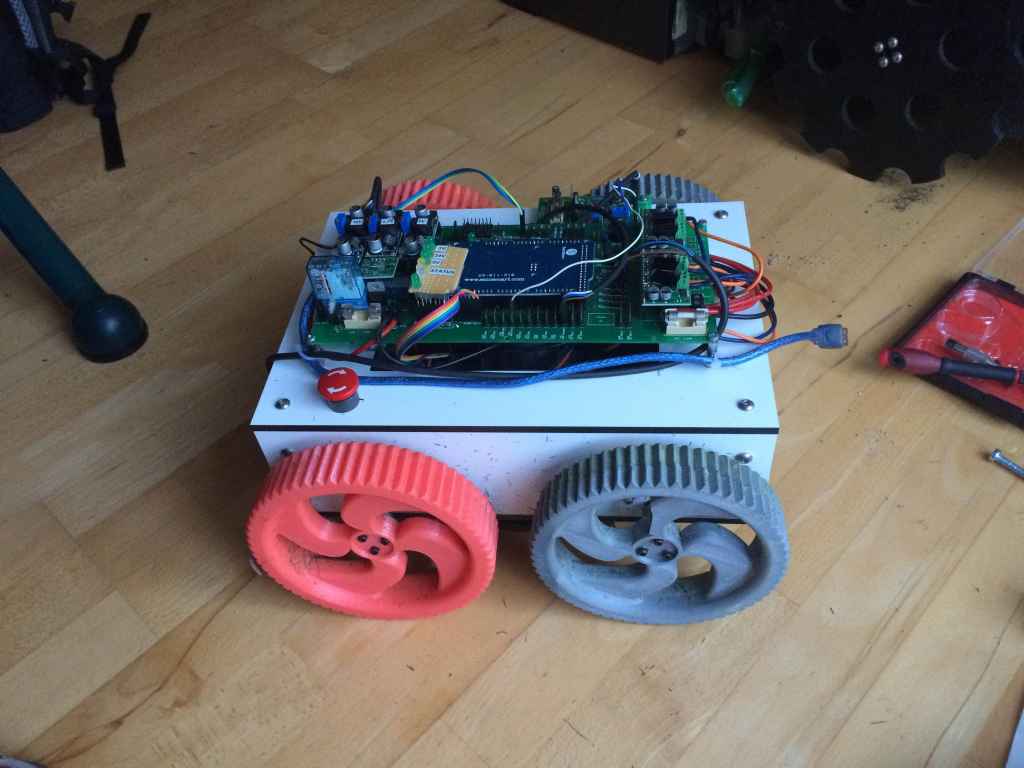
Ja die Farbe der Räder gefällt mir nicht ich hatte rotes Material für den drucker bestellt und wenn man es ausdruckt hat es dieses komische rosa. Die gegossenen Teile werden dann in schwarz sein. Das mit dem Falten des Geheuse ist echt cool. Schön das du die Möglichkeit hast zum Fräsen.
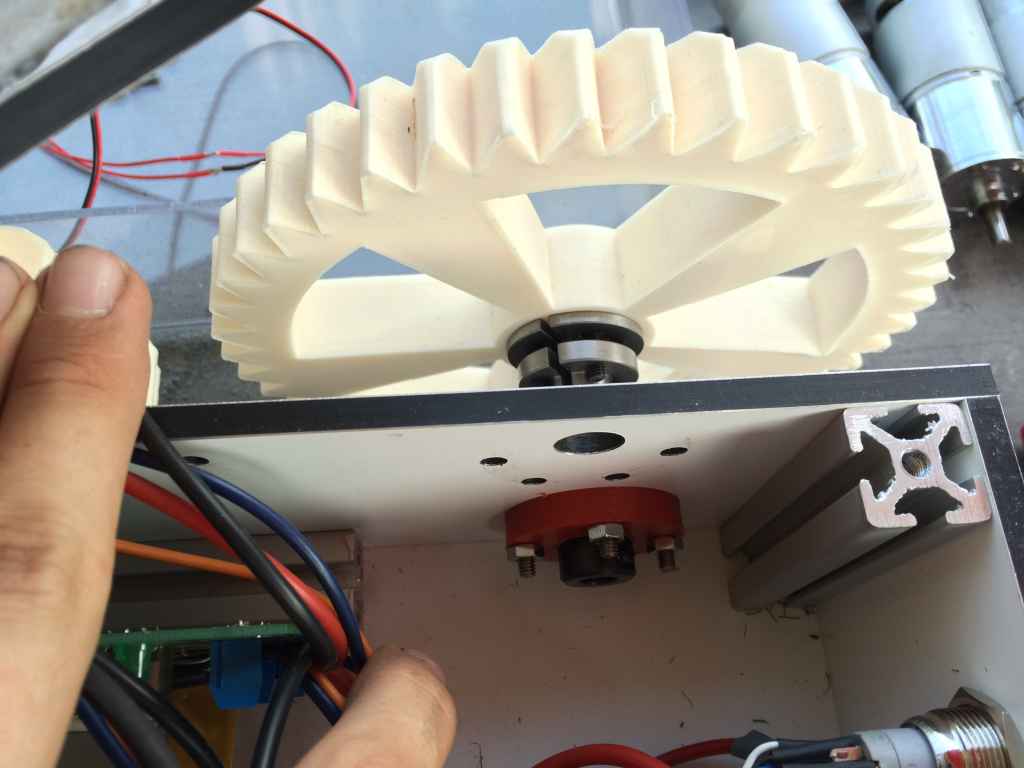
So das mit dem Gießen ist nicht so einfach. Im Bild in rosa gedrückt und in grau gegossen.

Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2420/image_2016-07-31.jpg/
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2420/image_2016-07-31.jpg/
{kind=link}
Zuletzt bearbeitet von einem Moderator:

Theoretisch unendlich.
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2420/image_2016-07-31-2.jpg/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
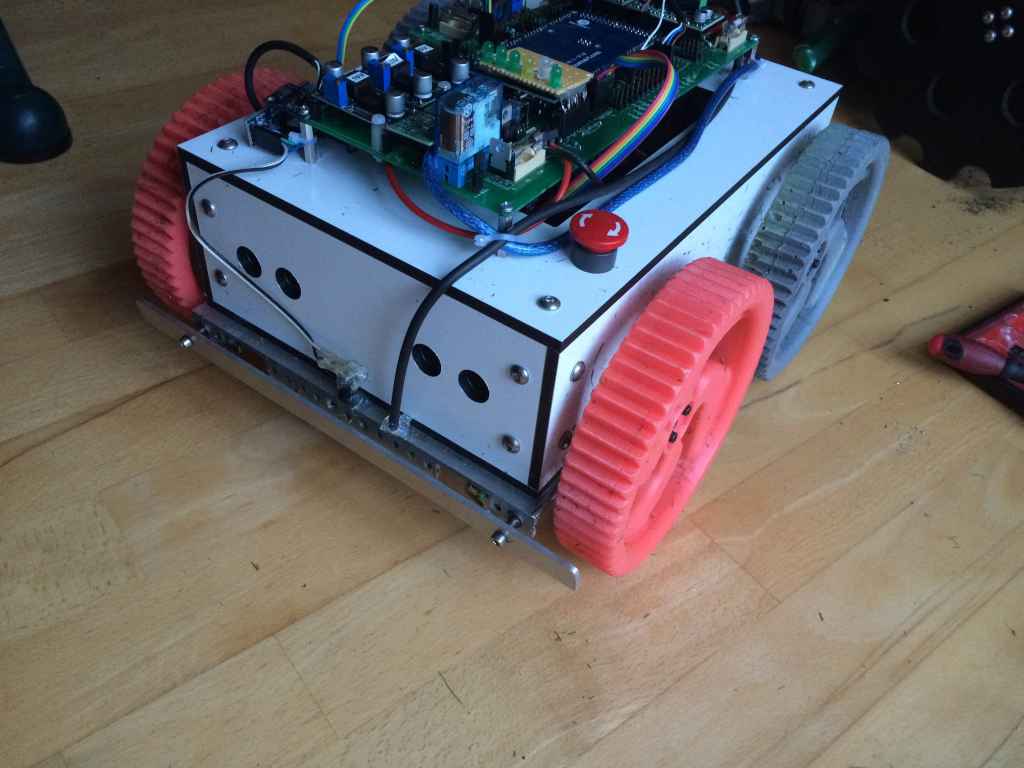
Es geht weiter
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2420/IMG_3587.jpg/
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2420/IMG_3587.jpg/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
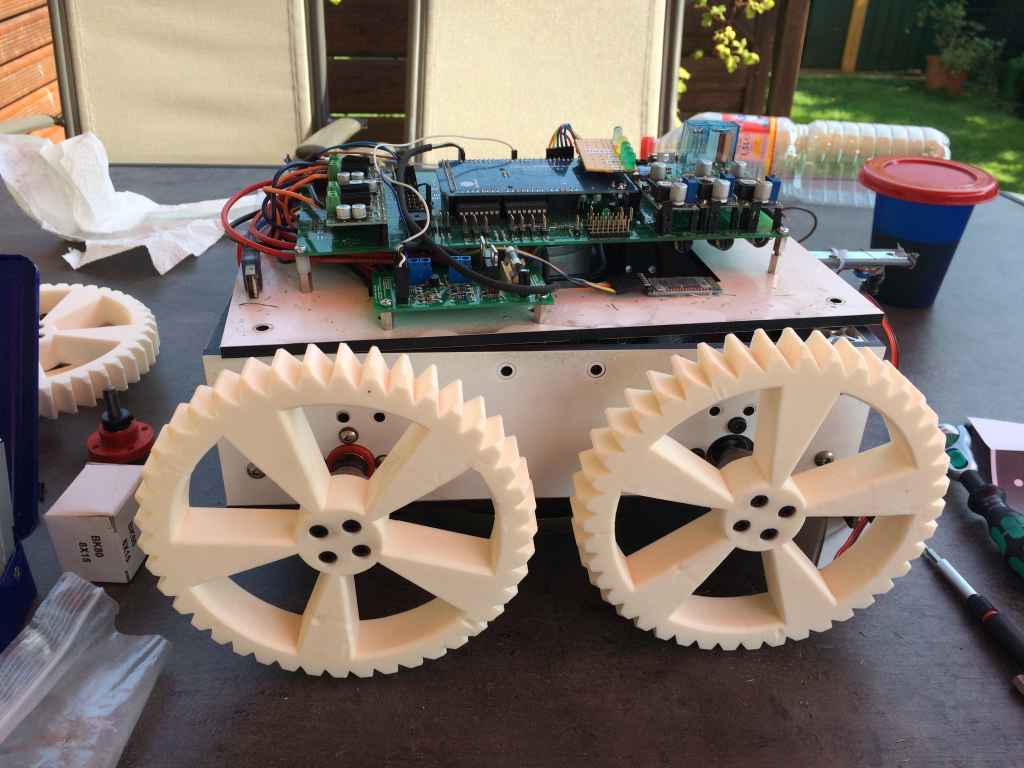
So ich habe mal ein wenig rumprobiert. Ich wollte gerne die Motoren aus dem Shop verwenden, leider stoße ich so an ein Problem. Ich habe die 2 Motoren diagonal eingebaut. Also ein Motor rechts vorne und einer Links hinten die anderen Räder laufen frei. Das Problem ist das sobald der Boden nicht gerade ist und das Gewicht des Mähers auf die nicht angetrieben Räder kommt bleibt er stehen und die Räder drehen durch. Hat jemand da eine Idee?
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2420/IMG_3957.jpg/
Attachment: https://forum.ardumower.de/data/media/kunena/attachments/2420/IMG_3957.jpg/
{kind=link}
Zuletzt bearbeitet von einem Moderator:
Hallo,
ich hatte ein ähnliches Problem mit ähnlichen Rädern. Das Problem war, dass der Roboter auf einer Schrägen auch seitlich weg rutschte, da durch das "Profil" nur in und gegen Fahrtrichtung ist.
Ich habe die Räder "geteilt" - also auf der Innenseite zusätzlich noch Räder dran gebaut, deren Durchmesser 10mm größer ist, die aber nur 5mm breit sind. Diese Räder versinken vollständig im Rasen und bieten somit auch seitlich halt. Die breiten Räder außen verhindern, dass der Roboter zu tief einsinkt.
Bei mir funktioniert das wunderbar.
VG Markus
ich hatte ein ähnliches Problem mit ähnlichen Rädern. Das Problem war, dass der Roboter auf einer Schrägen auch seitlich weg rutschte, da durch das "Profil" nur in und gegen Fahrtrichtung ist.
Ich habe die Räder "geteilt" - also auf der Innenseite zusätzlich noch Räder dran gebaut, deren Durchmesser 10mm größer ist, die aber nur 5mm breit sind. Diese Räder versinken vollständig im Rasen und bieten somit auch seitlich halt. Die breiten Räder außen verhindern, dass der Roboter zu tief einsinkt.
Bei mir funktioniert das wunderbar.
VG Markus
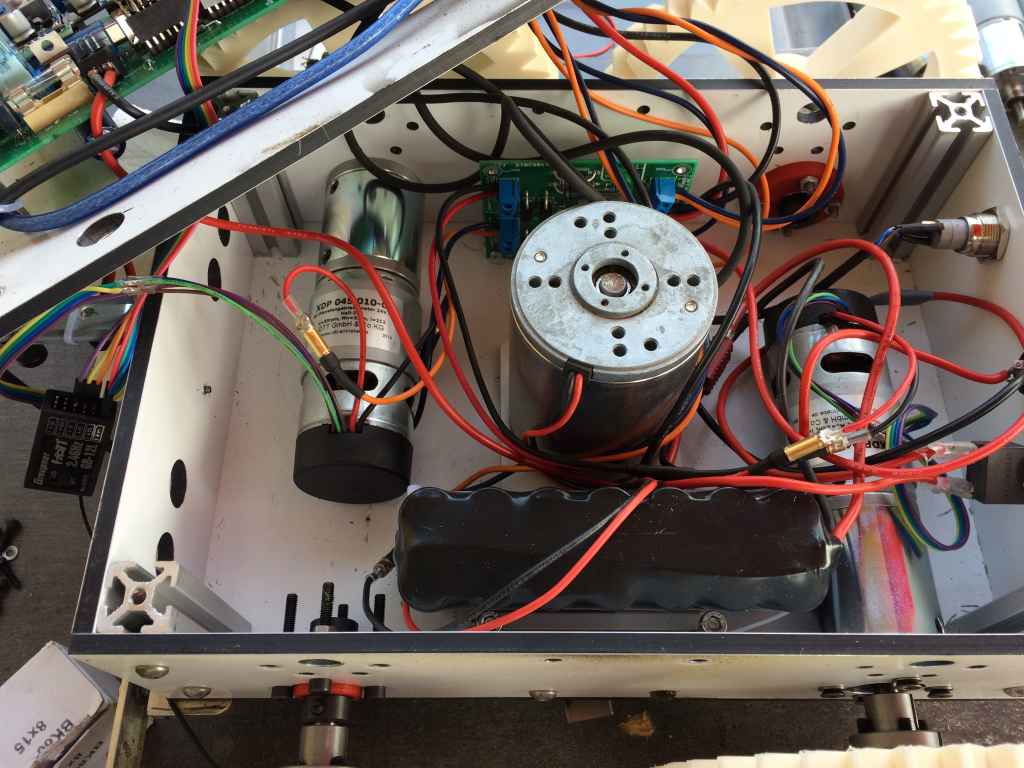
Heute komme ich endlich auch mal wieder dazu, mich an der Diskussion zu beteiligen. Es ist ja zwischenzeitlich einiges passiert. Leider komme ich immer nur am Wochenende zum Experimentieren und das auch bei weitem auch nicht an jedem. Am mechanischen Aufbau habe ich nichts mehr geändert. Der Joschi hat jetzt also eine Form, die an den guten alten Castor-Behälter erinnert.
Gegenwärtig habe ich mir (ohne zeitliche Vorstellungen) folgendes vorgenommen:
[ol]
[li]Unterdrückung der Störungen, die von den fünf Motoren auf die Perimeter-Empfangsspulen einwirken. Es ist ja nicht so, das der Perimeterdraht nicht erkannt wird - das funktioniert super - nur mit zunehmender Entfernung erkennt er nicht mehr den Unterschied zwischen Innen und Außen.
[/li]
[li]Bidirektionales Mähen, wie es sich für einen symmetrisch aufgebauten Mäher gehört.[/li]
[li]Bidirektionales Mähen in Bahnen.[/li]
[/ol]
Marco2, dich wollte ich noch fragen, wieso du gegenüber deinem ersten Aufbau auf zwei Motoren gewechselt bist. Gibt es dafür einen handfesten Grund?
Bis bald!
Jürgen
Gegenwärtig habe ich mir (ohne zeitliche Vorstellungen) folgendes vorgenommen:
[ol]
[li]Unterdrückung der Störungen, die von den fünf Motoren auf die Perimeter-Empfangsspulen einwirken. Es ist ja nicht so, das der Perimeterdraht nicht erkannt wird - das funktioniert super - nur mit zunehmender Entfernung erkennt er nicht mehr den Unterschied zwischen Innen und Außen.
[/li]
[li]Bidirektionales Mähen, wie es sich für einen symmetrisch aufgebauten Mäher gehört.[/li]
[li]Bidirektionales Mähen in Bahnen.[/li]
[/ol]
Marco2, dich wollte ich noch fragen, wieso du gegenüber deinem ersten Aufbau auf zwei Motoren gewechselt bist. Gibt es dafür einen handfesten Grund?
Bis bald!
Jürgen
@ Jürgen
Die nachteile vom allradantrieb ist:
- keine Odometrie
- die Getriebe sind lauter als die von den aus dem Shop
- die Motorenlager werden stark belastet (bei mir wackeln schon 2 Räder sehr doll weil die Buchsen ausgeschlagen sind)
Vorteile:
- viel kraft
- sehr gute kraftverteilung auf den Robi
- geringe einbaugröße
Die nachteile vom allradantrieb ist:
- keine Odometrie
- die Getriebe sind lauter als die von den aus dem Shop
- die Motorenlager werden stark belastet (bei mir wackeln schon 2 Räder sehr doll weil die Buchsen ausgeschlagen sind)
Vorteile:
- viel kraft
- sehr gute kraftverteilung auf den Robi
- geringe einbaugröße