Hallo miteinander,
natürlich möchte ich euch auch mein Konstrukt - Joschi getauft - nicht vorenthalten!
Ursprünglich war ich von meinem Nachbarn zur Rechten engagiert worden, um während längerer Abwesenheit seine beiden AutoMower 305 von Husqvarna aus den unterschiedlichsten "misslichen Lagen", in denen sie sich festgefahren hatten, zu befreien. Dazu muss man wissen, dass wir beide Grundstücke in Hanglage mit ziemlichen Steigungen, stark vermoostem Waldboden, der bei Nässe die Räder durchdrehen lässt und unendlich vielen Kienäpfeln märkischer Kiefern haben (insofern kann man an die Odometrie gleich einen Haken machen).
Da Nachbars AutoMower, um geschlossene Flächen zu erhalten, teilweise über mein Grundstück fährt, hatte ich Gelegenheit ihn "bei der Arbeit" zu studieren und Schwachstellen zu erkennen. Ausschlaggebend für den Entschluss: "Will ich haben!" war jedoch eine Erkenntnis , die ich bisher noch nie irgendwo gelesen habe. Da, wo der Mower täglich langfährt, wächst früher oder später kein Moos mehr! Das hat mich im vorher/nachher-Vergleich entlang des Führungsdrahtes vom AutoMower 305 total überzeugt.
Aber da war dann auch schon mein Ehrgeiz als Elektroniker geweckt, so etwas selbst zu bauen – kaufen kann schließlich jeder. Der Kaufpreis des Autowower 305 tat ein Übriges. Nun zu meinen Prämissen:
[ul]
[li]klein und preiswert beginnen, um Verluste beim Scheitern des Projektes im Rahmen zu halten. [/li]
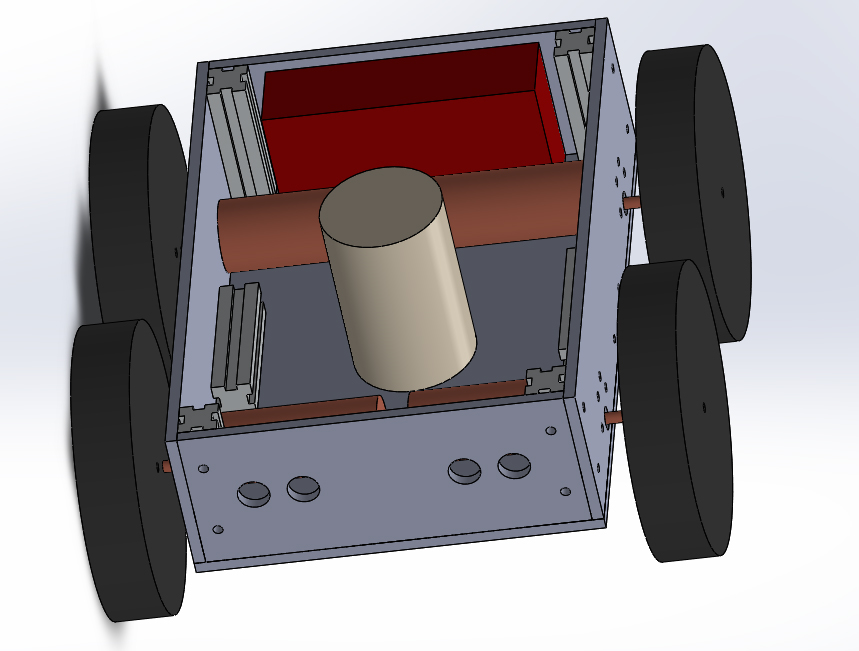
[li]Testaufbau aus aluminiumkaschiertem Kunststoff [/li]
[li]echter Allradantrieb mit vier Rädern, um das zuvor beobachtete Festfahren zu verhindern[/li]
[li]vier Fahrmotoren als Getriebemotoren aus Fernost (Stück 16,- €)[/li]
[li]streng symmetrischer Aufbau des Mowers - prädestiniert für bidirektionales Mähen[/li]
[li]möglichst wenige Rollbewegungen, die bei vermoostem Rasen sehr schnell zu "Glatzen" führen (siehe AutoMower vor seiner Ladeschale)[/li]
[li]Mähmotor, Scheibe (Durchmesser ca. 19 cm) und Messer von Marotronics[/li]
[li]ausschließlich die Größe des Mähwerks bestimmt Gesamtgröße des Mowers (ohne Räder), alles andere wäre unsinnig – aktuell 21 x 30 cm[/li]
[li]24 Volt Betriebsspannung. 2 x 12 Volt 2,2 Ah Bleigelakkumulatoren, da für Erpobungen vorhanden – später vielleicht LiPo o.ä.[/li]
[li]Steuerung über eine handvoll PIC-Controller von Microchip für ein paar Cent und vorhandener dienstlicher Programmiererfahrung und -hardware. Für jeden Sensor bzw. Actor einen Controller plus ein Master.[/li]
[li].....[/li]
[/ul]
Soweit meine anfänglichen Überlegungen. Darauf beruht auch die mechanische Grundkonzeption. Und dann bin ich auf die ArduMower-Seite gestoßen! Das hat mein Projekt entscheidend vorangebracht. Dazu aber beim nächsten mal mehr.
Jürgen
natürlich möchte ich euch auch mein Konstrukt - Joschi getauft - nicht vorenthalten!
Ursprünglich war ich von meinem Nachbarn zur Rechten engagiert worden, um während längerer Abwesenheit seine beiden AutoMower 305 von Husqvarna aus den unterschiedlichsten "misslichen Lagen", in denen sie sich festgefahren hatten, zu befreien. Dazu muss man wissen, dass wir beide Grundstücke in Hanglage mit ziemlichen Steigungen, stark vermoostem Waldboden, der bei Nässe die Räder durchdrehen lässt und unendlich vielen Kienäpfeln märkischer Kiefern haben (insofern kann man an die Odometrie gleich einen Haken machen).
Da Nachbars AutoMower, um geschlossene Flächen zu erhalten, teilweise über mein Grundstück fährt, hatte ich Gelegenheit ihn "bei der Arbeit" zu studieren und Schwachstellen zu erkennen. Ausschlaggebend für den Entschluss: "Will ich haben!" war jedoch eine Erkenntnis , die ich bisher noch nie irgendwo gelesen habe. Da, wo der Mower täglich langfährt, wächst früher oder später kein Moos mehr! Das hat mich im vorher/nachher-Vergleich entlang des Führungsdrahtes vom AutoMower 305 total überzeugt.
Aber da war dann auch schon mein Ehrgeiz als Elektroniker geweckt, so etwas selbst zu bauen – kaufen kann schließlich jeder. Der Kaufpreis des Autowower 305 tat ein Übriges. Nun zu meinen Prämissen:
[ul]
[li]klein und preiswert beginnen, um Verluste beim Scheitern des Projektes im Rahmen zu halten. [/li]
[li]Testaufbau aus aluminiumkaschiertem Kunststoff [/li]
[li]echter Allradantrieb mit vier Rädern, um das zuvor beobachtete Festfahren zu verhindern[/li]
[li]vier Fahrmotoren als Getriebemotoren aus Fernost (Stück 16,- €)[/li]
[li]streng symmetrischer Aufbau des Mowers - prädestiniert für bidirektionales Mähen[/li]
[li]möglichst wenige Rollbewegungen, die bei vermoostem Rasen sehr schnell zu "Glatzen" führen (siehe AutoMower vor seiner Ladeschale)[/li]
[li]Mähmotor, Scheibe (Durchmesser ca. 19 cm) und Messer von Marotronics[/li]
[li]ausschließlich die Größe des Mähwerks bestimmt Gesamtgröße des Mowers (ohne Räder), alles andere wäre unsinnig – aktuell 21 x 30 cm[/li]
[li]24 Volt Betriebsspannung. 2 x 12 Volt 2,2 Ah Bleigelakkumulatoren, da für Erpobungen vorhanden – später vielleicht LiPo o.ä.[/li]
[li]Steuerung über eine handvoll PIC-Controller von Microchip für ein paar Cent und vorhandener dienstlicher Programmiererfahrung und -hardware. Für jeden Sensor bzw. Actor einen Controller plus ein Master.[/li]
[li].....[/li]
[/ul]
Soweit meine anfänglichen Überlegungen. Darauf beruht auch die mechanische Grundkonzeption. Und dann bin ich auf die ArduMower-Seite gestoßen! Das hat mein Projekt entscheidend vorangebracht. Dazu aber beim nächsten mal mehr.
Jürgen
") Würdest Du uns verraten welche Getriebe-Motoren das genau sind?
Würdest Du uns verraten welche Getriebe-Motoren das genau sind? 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}