elektronikjogi
Moderator
Hi,
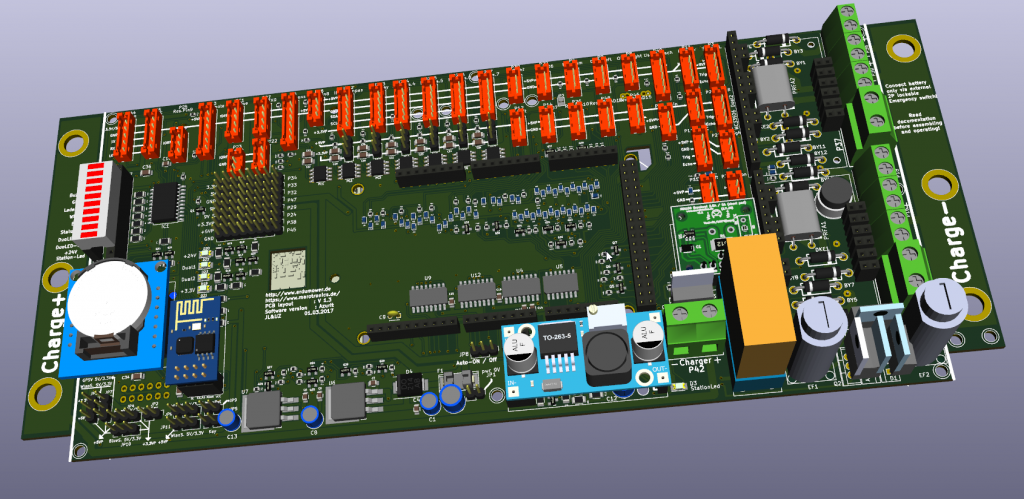
Uwe hat mir gerade ein Bild vom aktuellen Stand geschickt.
Das Board ist noch in der Entwicklung.... All die Erkenntnisse und Verbesserungen der Vergangenheit wurden eingearbeitet. Auch ist dieses Board voll mit dem Mega2560/Arduino-DUE kompatibel ohne dutzende von Jumpern oder Tricks anwenden zu müssen. Auch die Offenheit für eigene Erweiterungen wurde erhalten, so das dieses Board auch großzügig Freiraum für eigene Entwicklungen lässt.
Gruß
Jürgen.
Uwe hat mir gerade ein Bild vom aktuellen Stand geschickt.
Das Board ist noch in der Entwicklung.... All die Erkenntnisse und Verbesserungen der Vergangenheit wurden eingearbeitet. Auch ist dieses Board voll mit dem Mega2560/Arduino-DUE kompatibel ohne dutzende von Jumpern oder Tricks anwenden zu müssen. Auch die Offenheit für eigene Erweiterungen wurde erhalten, so das dieses Board auch großzügig Freiraum für eigene Entwicklungen lässt.
Gruß
Jürgen.
{kind=link}