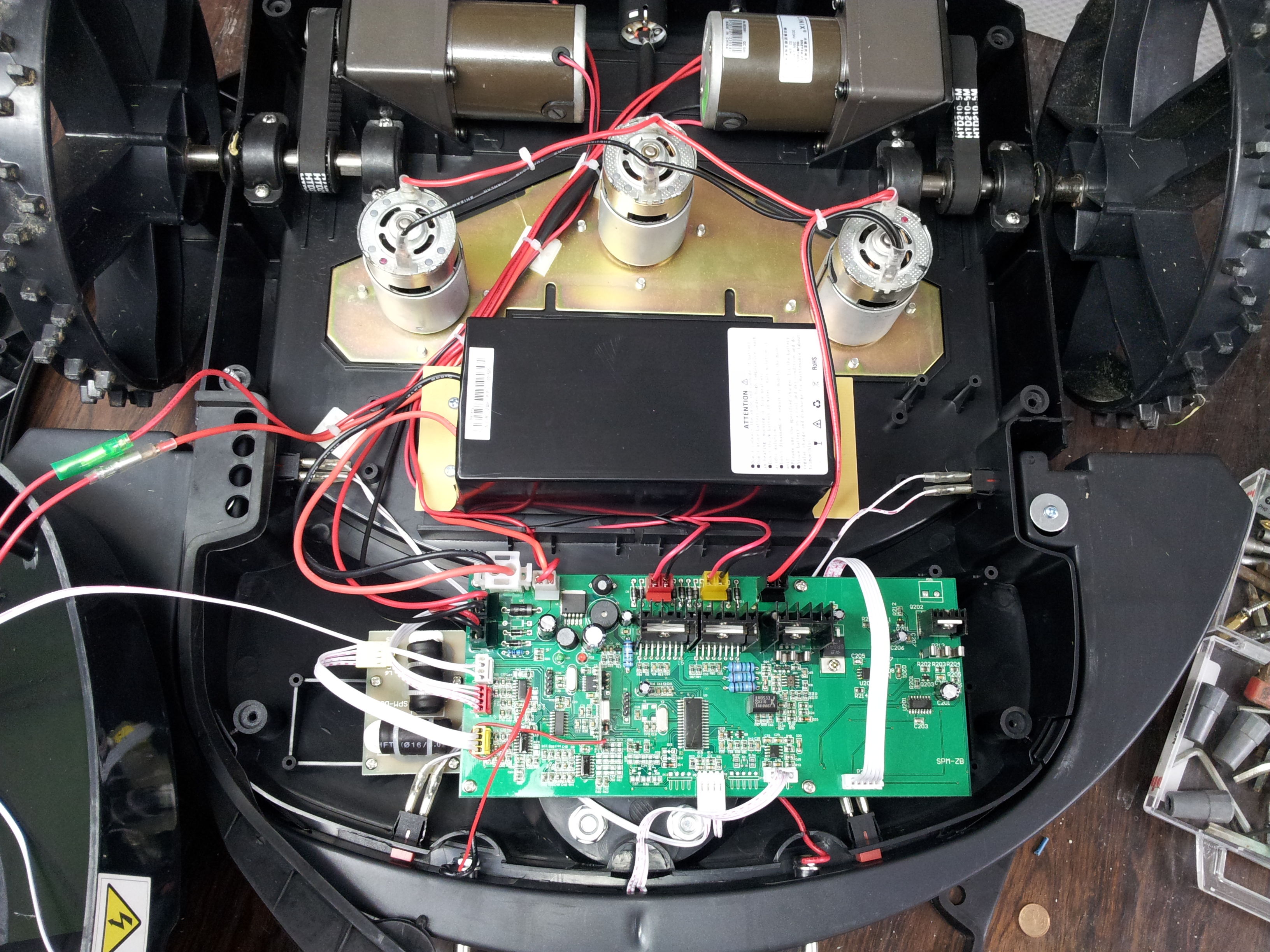
Roger schrieb:nero76 schrieb:Hier mal ein aktuelles Bild von meinem Ardumower L50 (Anhang)
Ich finde ziemlich starker Kabelverhau! (Kann man das irgendwie schöner machen?)
PS: Sollen wir eine Art "Gallerie" anlegen wo jeder ein paar Bilder seines "Gesamtkunstwerkes" ablegen kann?
Hallo Alexander,
den Durchblick durch den „Drahtverhau“ wird wohl nur der Erbauer haben, aber eigentlich reicht das auch.
Und wenn der Deckel drauf ist, bleibt die schöne Technik eh unsichtbar.
Die Idee mit der Galerie finde ich gut, das würde ich begrüßen und bin heute schon gespannt auf die Bilder.
Vielleicht könnte man auch eine Rubrik für Selberbauer einrichten, also für Leute die nicht eine vorhandene Basis
mit der Arduino-Steuerung nachrüsten, sondern die auch das Chassis und Fahrwerk selbst bauen.
Da ich meinen sich noch in der Gewährleistungszeit befindenden Rotenbach nicht verbasteln will,
juckt es mir auch in den Fingern, eine eigene Konstruktion zu entwerfen. Hier könnte man Ideen realisieren,
die mit noch so ausgeklügelter Elektronik nicht zu erreichen sind.
Ich denke da an Dinge wie
Mähen vor den Antriebsrädern, also bevor das Gras plattgewalzt wird,
Turbinenmesser oder Luftturbine á la Honda Miimo zum Aufrichten des Grases,
Handelsübliche Werkzeugakkus zum Einstecken als Stromversorgung,
Gleichmäßiges Verteilen von Rasendünger über den Mähteller,
Verwendung von Rasenbürsten
Einklinken eines autarken Mähmotors beim Kantenschnitt, damit das Nacharbeiten mit dem Trimmer ein Ende hat
Sicher gibt es noch viele weitere machbare oder weniger sinnvolle Ideen.
Was haltet ihr davon?
Grüße Roger
")
Galerie steht zur Verfügung, könnt Ihr drauf zu greifen? Ich werde morgen mal wegen der Rechte nachschauen.
Ansonsten ist die Bastelecke eröffnet, wenn Ihr Vorschläge/Wünsche habt, immer her damit.
Zuletzt bearbeitet von einem Moderator:

{kind=link}