Ja Frank,
gute Idee. Vielleicht war mein Problem ja auch nur durch den Eingriff im Handysetup (pfod) bei laufendem Mähwerk durch drastische Rücknahme der Max.-Drehzahl bedingt - dieser Fall tritt im Normalbetrieb nicht auf.
Ich habe derzeit außer der Odometrie, dem Button und den Bumperkontakten keinen weiteren Sensor eingebaut und alle auch im Setup deaktiviert.
Habe mir auf besonderen Wunsch einer einzelnen Dame vorgestern einen Husquarna Robby angeschaut, aber der kann nicht mal den Rand verfolgen - und das für 2.6xy EURonen. Der Ardumower ist nach meinem Eindruck technologisch, vom Potential und von den Ausbauoptionen schon viel weiter ...
Gruß ... Peter
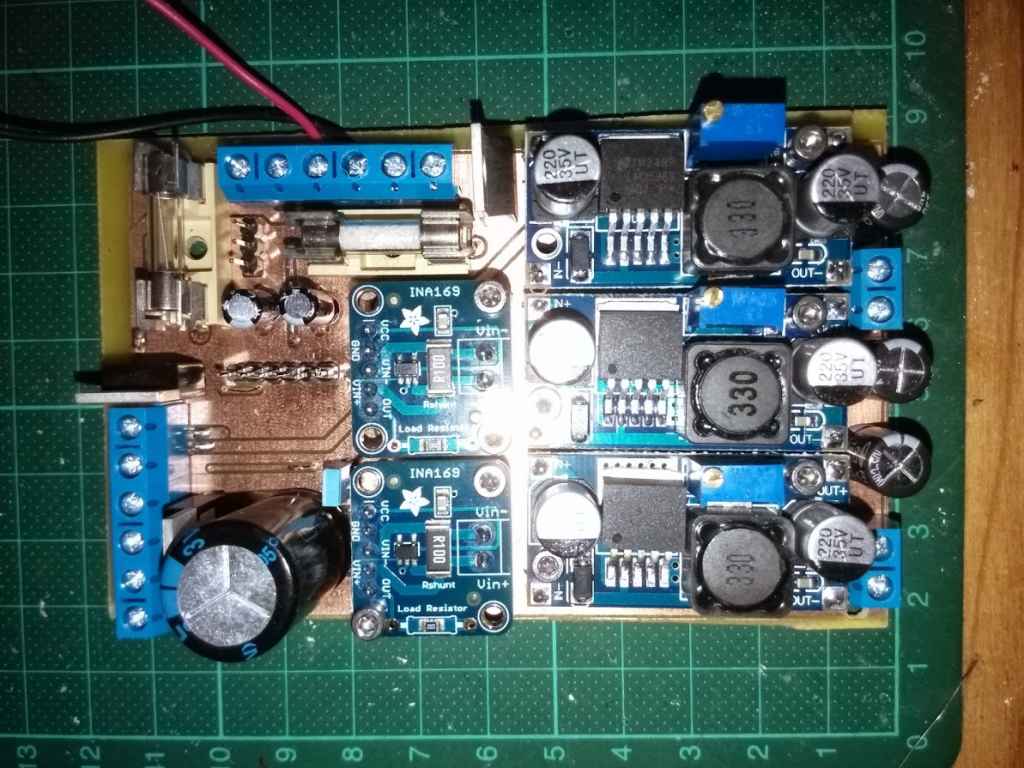
P.S.: Vielleicht ist mein Problem auch in meiner Ausführung der Parallelschaltung des Motortreibers für den Mähantrieb begründet. Ich checke das morgen nochmal durch.
gute Idee. Vielleicht war mein Problem ja auch nur durch den Eingriff im Handysetup (pfod) bei laufendem Mähwerk durch drastische Rücknahme der Max.-Drehzahl bedingt - dieser Fall tritt im Normalbetrieb nicht auf.
Ich habe derzeit außer der Odometrie, dem Button und den Bumperkontakten keinen weiteren Sensor eingebaut und alle auch im Setup deaktiviert.
Habe mir auf besonderen Wunsch einer einzelnen Dame vorgestern einen Husquarna Robby angeschaut, aber der kann nicht mal den Rand verfolgen - und das für 2.6xy EURonen. Der Ardumower ist nach meinem Eindruck technologisch, vom Potential und von den Ausbauoptionen schon viel weiter ...
Gruß ... Peter
P.S.: Vielleicht ist mein Problem auch in meiner Ausführung der Parallelschaltung des Motortreibers für den Mähantrieb begründet. Ich checke das morgen nochmal durch.



{kind=link}
{kind=link}