Beschreibung für das Wiki nur in Deusch - Englisch ist leider nicht mein Fall
Arduino Dropsensor - Absturzsensor
Funktion:
Der
Arduino Dropsensor oder auch Absturzsensor ist dafür gedacht den Mover vor abstürzen vor Treppenabsätzen oder ähnlichen zu schützen. Ebenso kann dieser eingesetzt werden um Inseln von Bäumen und Blumenbeeten zu erkennen.Voraussetzung dafür ist allerdings das dieser an der Graskante hin zur Insel mit einem kleinen Graben umgeben wird damit dieser zuverlässig erkannt werden
Anschluß:
Benötigt werden 2 IR Entfernungssensoren. Am besten sind solche geeignet die bereits in einem externen Gehäuse eingebaut sind. Diese haben auch auf der Rückseite eine Einstellmöglichkeit für die Entfernung bzw Empfindlichkeit. Die Standard Ausführung genötigt 3 Anschlussleitungen .
+5V, GND, Signalleitung und haben eine Empfindlichkeit von ca 30mm – 800mm.
Bei den Sensor den ich verwende handelt es sich um einen der gegen GND geschaltet wird. Ich habe zusätzlich eine Diode in die Signalleitung mit eingebaut um eventuelle positive Spannungen zum Bord zu blockieren und um einen eindeutigen Schaltzustand zu gewährleisten.
ohne Diode
IR leuchtet bei Kontakt zur Oberfläche
Messung:
+ nach Signalausgang = 4,96V
- nach Signalausgang = 0V
IR leuchtet nicht über den Abgrund
Messung:
+ nach Signalausgang = 0V
- nach Signalausgang = 3,72V ( das hat mich gestört ) deshalb habe ich die Diode eingebaut
jetzt das ganze mit Diode in der Signalleitung
IR leuchtet bei Kontakt zur Oberfläche
Messung:
+ nach Signalausgang = 4,7V
- nach Signalausgang = 0V
IR leuchtet nicht über den Abgrund
Messung:
+ nach Signalausgang = 0V
- nach Signalausgang = 0V
jetzt 0V gemessen zwischen - und Signalausgang
Ich hatte bedenken gehabt das die 3,72V ein undefinierten Eingang schaffen was evl Probleme bei der Auswertung geben könnte.
Einstellung im Sketsch:
Die Absturzsensoren sind ab der Softwarefunktion 242 integriert.
Der Anschluss des Linken und Rechten Absturzsensor sind an den Pin 45 und 23 vorgesehen.
Um die Funktion zu aktivieren sind folgende Einstellungen in der Mower.ccp vorzunehmen.
// ---- drop ----
dropUse = 1; // has drops? -Dropsensor - Absturzsensor vorhanden 0-nein 1-Ja
dropcontact = 1; //contact Kontaktausführung 0-Öffner 1-Schließer
Verdrahtung:
Die IR Sensoren sollten möglichst weit vorne vor den Rädern angebracht werden. Um evl Reichweiten Schwankungen zu vermeiden sollten sie vor fremd Licht geschützt werden.
Die IR Sensoren sollten so eingestellt werden das diese im normalen Betrieb leuchten, und wenn man den Mover hochhebt ausgehen.
Am besten gleich auf der Grasoberfläche testen oder dort zumindest gegebenenfalls nachjustieren.
In der Seriellen Ausgabe kann man den richtigen Anschluss kontrollieren. Sollte der Mover im Normalbetrieb den Kontakt zur Oberfläche haben sollte der Dropsensor nicht ausgelöst sein bzw der Counter des Dropsensors sollte nicht hochgezählt werden.
Falls das so nicht sein sollte, ist die Einstellung in der Mower.ccp Datei zu kontrollieren bzw. zu ändern. „ Dropcontact =1 oder 0 ändern“
(Kann je nach verwendeten Sensoren anders sein)
Danach den Mower anheben so das dieser den Kontakt zur Oberfläche verliert.
Darauf hin sollte der seriellen Konsole sichtbar sein das der Dropsensor ausgelöst hat bzw. der Counter hochzählen tut.
Darauf hin kann das ganze im Automatischen Betrieb getestet werden.
Evl sollte noch die Acceleration angepasst werden. Das die Beschleunigungszeit bzw. die Abbremszeit der Antriebsmotoren. Dieser Wert muss evl. angepasst bzw. herunter gesetzt werden damit der Mover schnell genug an der Gefahrenstelle anhalten kann.
Bekannte Probleme:
Ich habe die Beobachtung gemacht das wenn man die Entfernungseinstellung wo anders macht und dann auf Gras setzt das dies nach justiert werden muss. Ebenfalls ist mir aufgefallen das wenn die Sensoren auf eine nasse Betonoberfläche Stoßen irrtümlich annehmen das die ein Abgrund erreicht haben. Da ich an meinen Testmower die Sensoren nur provisorisch angebracht habe kann ich mir vorstellen das Fremdlicht zu Problemen in der Erkennung führen kann.
Ich vermute daher das wen man die Sensoren vor Fremdlicht schützt die Zuverlässigkeit weiter erhöht. Evl ist es nötig mit einer LED die Fläche zu beleuchten um immer eine gleichmäßige Helligkeit zu gewährleisten.
Vielleicht kann jemand das ganze mal ins englische übersetzen. Ansonsten wäre es zumindest ein Anfang das ganze in Deutsch einzupflegen.
Gruß
Uwe
Attachment:
https://forum.ardumower.de/data/media/kunena/attachments/1259/IrSensor.jpg/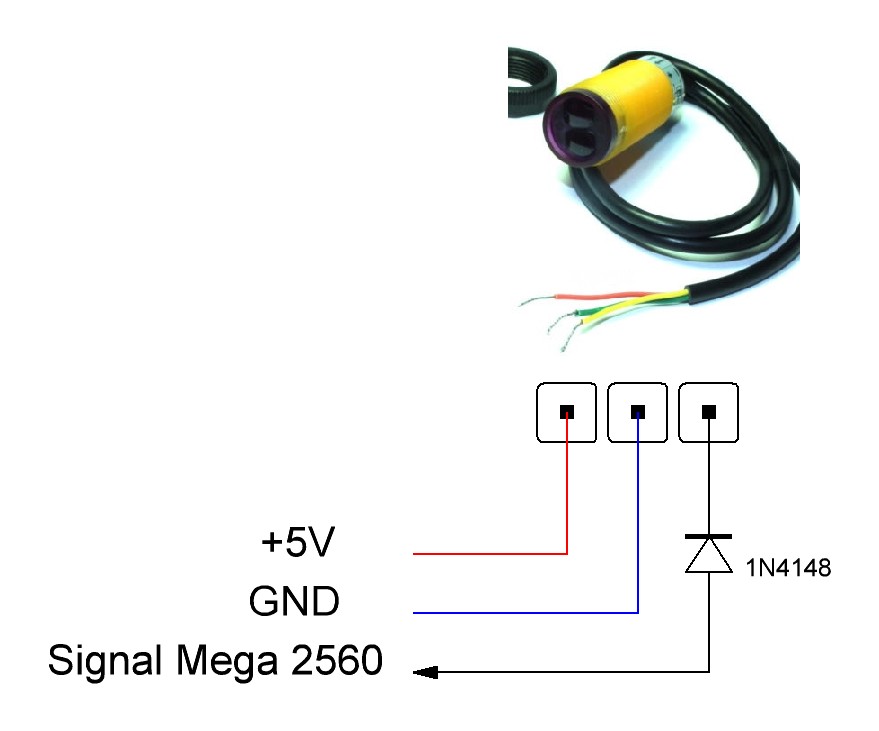
")

{kind=link}
{kind=link}