elektronikjogi
Moderator
Nach dem ich jetzt auch stolzer Besitzer eines DaVinci 1.0A bin, habe ich mir gedacht es ist sicher eine gute Idee die ganzen 3D-Modelle die bis jetzt so entstanden sind mit euch zu teilen. Wer sich in dieser Richtung auch beschäftigt, sei hiermit eingeladen seine Arbeit und Ideen mit uns hier zu teilen. Am besten immer mit ein paar Fotos und den notwendigen STL Dateien.
Ich selbst zeichne mit AUTODESK 123D DESIGN und habe den DaVinci 1.0A 3d-Drucker. Diesen Drucker kann ich all denen empfehlen die sich nicht auch noch mit der 3D-Druck-Technik bis in den letzten Meter auseinandersetzen möchten. Dazu fehlt mir persönlich die Zeit und ich hebe mir das für die Rente auf . Hinstellen, Kalibrieren läuft. Zum Kalibrieren gibt es sogar eine APP für Android mit der der ganze Vorgang gerademal 10 Minuten dauert.
. Hinstellen, Kalibrieren läuft. Zum Kalibrieren gibt es sogar eine APP für Android mit der der ganze Vorgang gerademal 10 Minuten dauert.
So genug der langen Rede hier mein erster Beitrag...
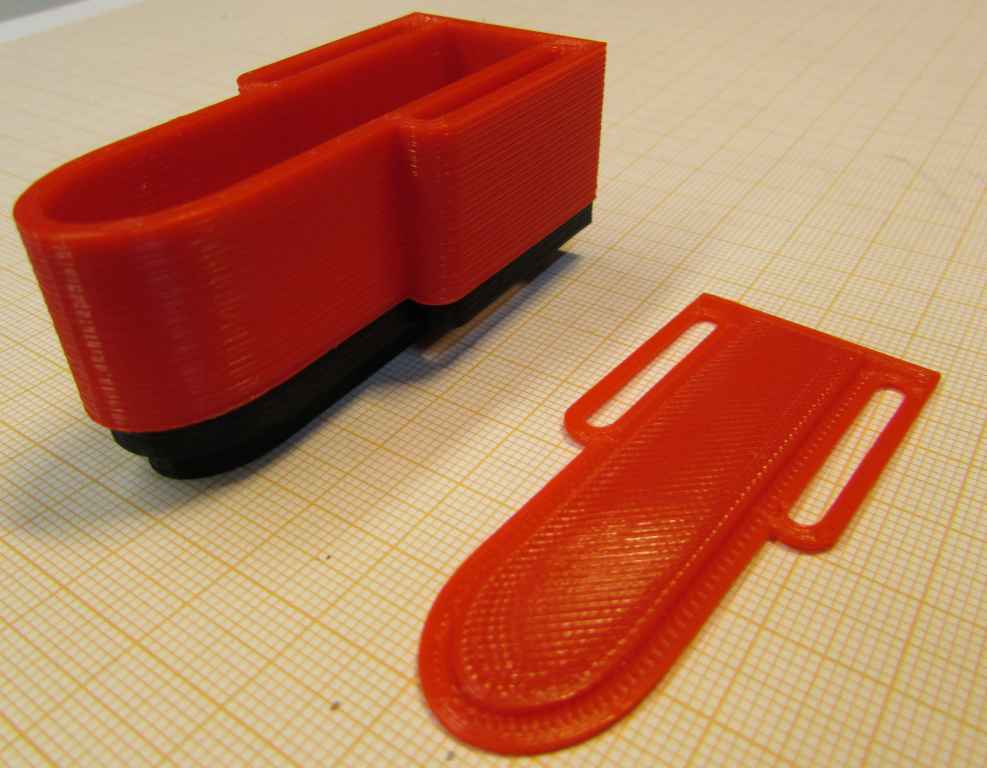
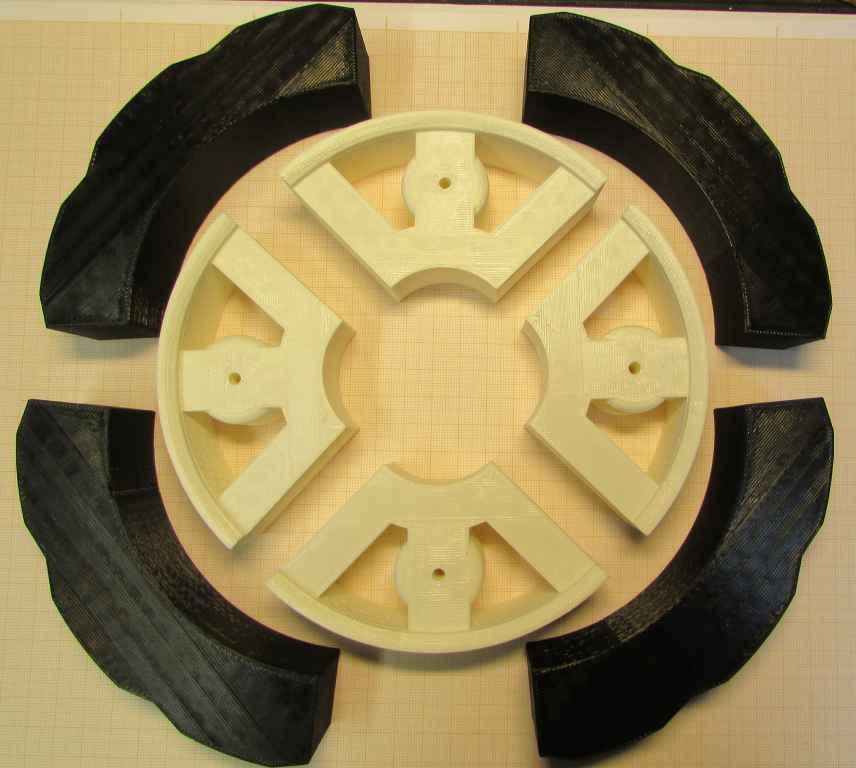
Ein Gehäuse für den Perimeter-Empfänger
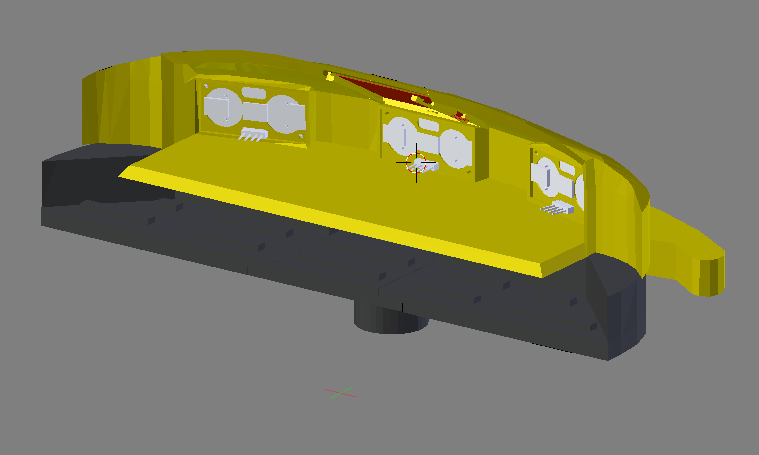
Die Einzelteile

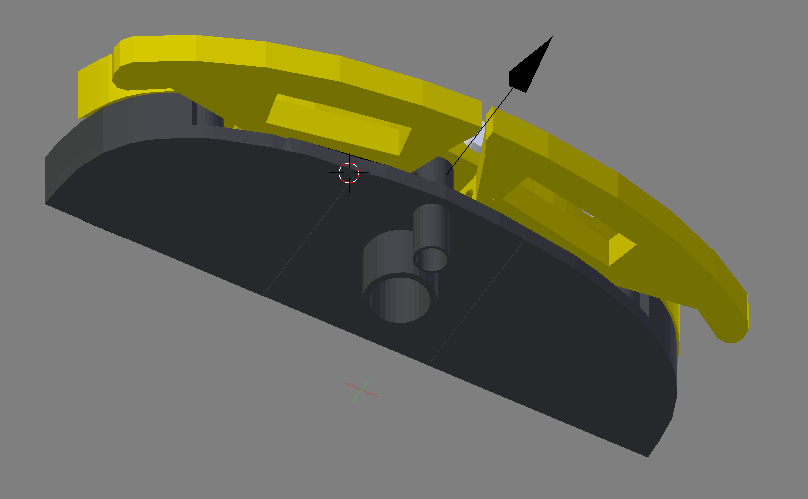
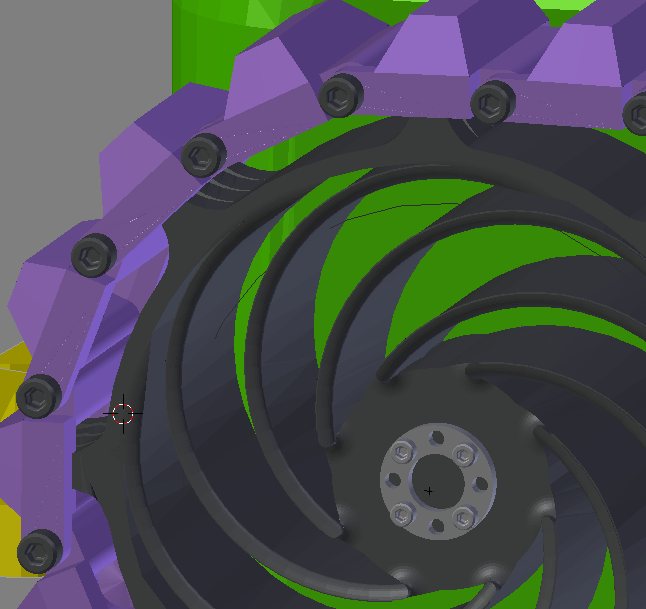
So gehört es später zusammen. Der Deckel ist noch offen.
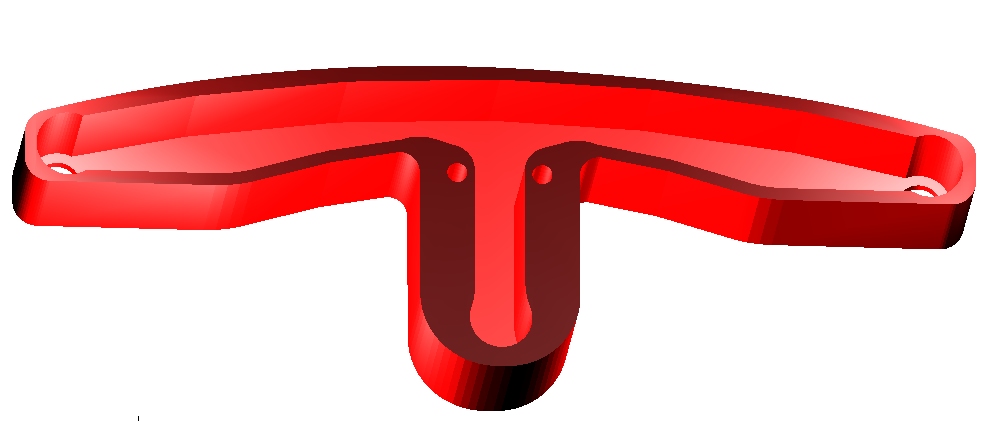
Die montierte Grundplatte etwas erhöt, um den Schrauben aus dem Weg zu gehen.
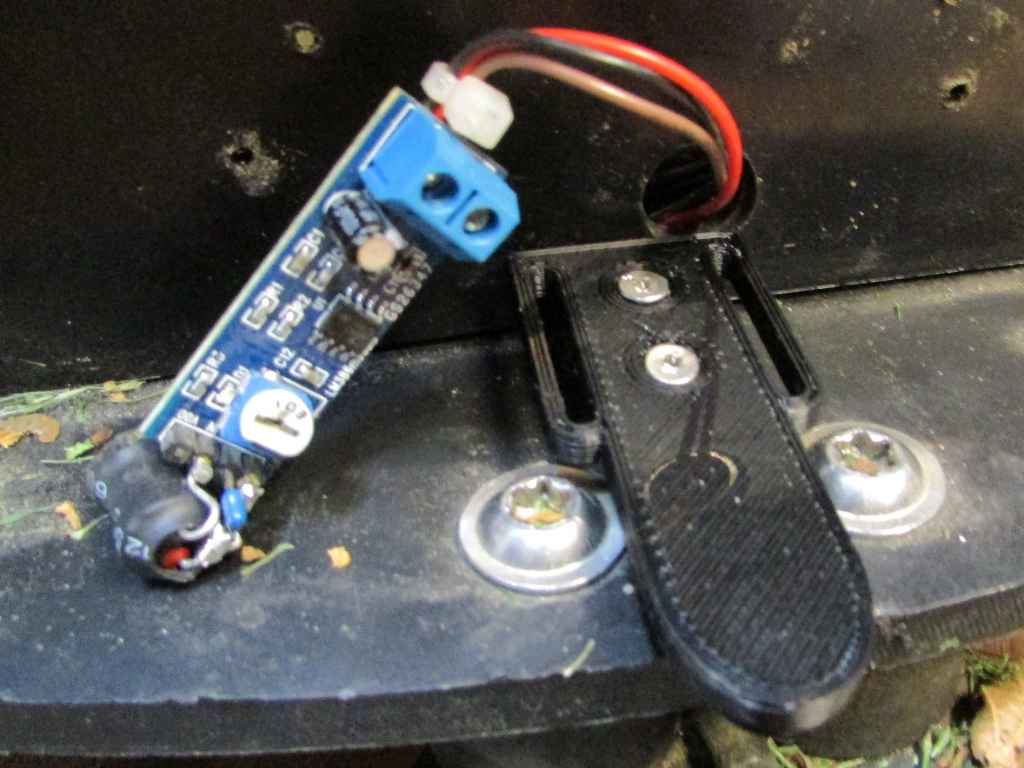
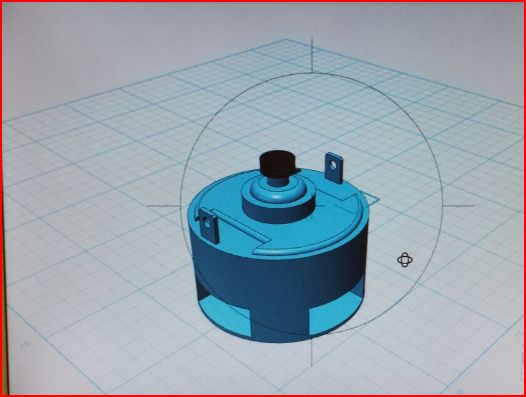
So sieht es aus wenn der Sensor eingebaut ist.

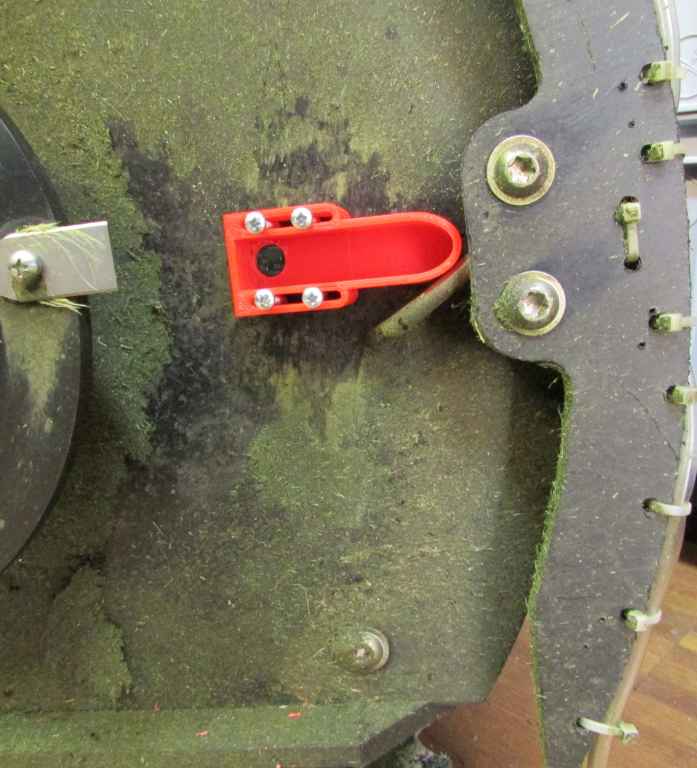
Fertig Deckel ist auch drauf und alles schön fest.

Nochmal zur Übersicht von vorne man kann auch die LED vom Sensor gut sehen.

Hier nochmal von der Seite

Die ZIP Dateien mit allen Files

Viel Spaß
Über Rückmeldungen würde ich mich freuen.
Ich selbst zeichne mit AUTODESK 123D DESIGN und habe den DaVinci 1.0A 3d-Drucker. Diesen Drucker kann ich all denen empfehlen die sich nicht auch noch mit der 3D-Druck-Technik bis in den letzten Meter auseinandersetzen möchten. Dazu fehlt mir persönlich die Zeit und ich hebe mir das für die Rente auf
. Hinstellen, Kalibrieren läuft. Zum Kalibrieren gibt es sogar eine APP für Android mit der der ganze Vorgang gerademal 10 Minuten dauert.So genug der langen Rede hier mein erster Beitrag...
Ein Gehäuse für den Perimeter-Empfänger
Die Einzelteile
So gehört es später zusammen. Der Deckel ist noch offen.
Die montierte Grundplatte etwas erhöt, um den Schrauben aus dem Weg zu gehen.
So sieht es aus wenn der Sensor eingebaut ist.
Fertig Deckel ist auch drauf und alles schön fest.
Nochmal zur Übersicht von vorne man kann auch die LED vom Sensor gut sehen.
Hier nochmal von der Seite
Die ZIP Dateien mit allen Files
Viel Spaß
Über Rückmeldungen würde ich mich freuen.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}